自動制御とは、検出器やセンサーからの信号を読み取り、目標値と比較しながら設備機器の運転や停止など「操作量」を制御して目標値に近づける命令です。その「操作量」を目標値と現在地との差に比例した大きさで考え、少しずつ調節する制御方法が「比例制御」と言われる方式です。比例制御の一般的な制御方式としては、「PID制御」というものがあります。このページでは、初心者の方でもわかりやすいように、「PID制御」のについてやさしく解説しています。
比例制御の方式
on-off制御よりも、制御結果の精度を上げる自動制御として、比例制御というものがあります。比例制御では、SV(設定値)を中心とした比例帯をもち、MV(操作量)が e(偏差)に比例する動作をします。比例制御を行うための演算方式として、PIDという3つの動作を組み合わせて、スムーズな制御を行っています。
- P動作:Proportinal(比例動作)
- I動作:Integral(積分動作)
- D動作:Differential(微分動作)
P制御とは:(比例制御)
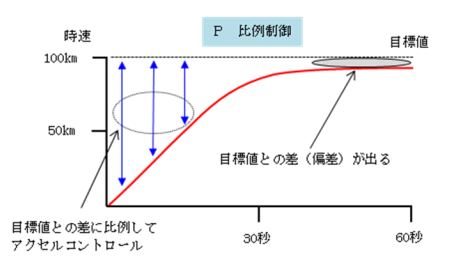
P制御(比例制御)とは、目標値と現在値との差に比例した操作量を調節する制御方式です。ある範囲内のMV(操作量)が、制御対象のPV(測定値)の変化に応じて0~100%の間を連続的に変化させるように考えられた制御のことです。通常、SV(設定値)は比例帯の中心に置きます。ON-OFF制御に比べて、ハンチングの小さい滑らかな制御ができます。
「車の運転」を例に説明しますと、目標値と現在値の差が大きければアクセルを多く踏込み、速度が増してきて目標値に近くなるとアクセルを徐々に戻してスピードをコントロールします。比例制御でうまく制御できるように思えますが、目標値に近づくと問題が出てきます。
それは操作量が小さくなりすぎ、それ以上細かくは制御できない状態になってしまい目標値にきわめて近い状態で安定してしまう現象が起きる事です。人間が運転操作する場合は目標値ピッタリに合わせる事は可能なのですが、調節機などを使って電気的にコントロールする場合、目標値との差(偏差)が小さくなりすぎると測定誤差の範囲内に収まってしまうために制御不可能になってしまうのです。
比例制御(P制御)は、ON-OFF制御に比べて徐々に制御出来るように考えられますが、実際は測定値が設定値に近づくと問題がおきます。そこで問題を解消するために考えられたのが、PI制御(比例・積分制御)です。
PI制御とは(比例・積分制御)
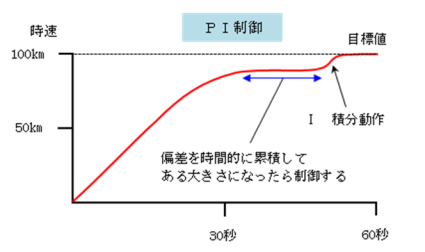
P制御(比例制御)における問題点は測定値が設定値に近づくと、操作量が小さくなりすぎて、制御出来ない状態になってしまいます。その結果として、設定値に極めて近い状態で安定してしまい、いつまでたっても「測定値=設定値」になりません。
このP制御(比例制御)における、測定値と設定値の差を「e(偏差)」といいます。比例制御では目標値に近づけることはできますが、目標値との誤差(偏差)は0にできない特性があります。この偏差をなくすために考えられたのが、「積分動作(I)」です。積分動作(I)は偏差を時間的に蓄積し、蓄積した量がある大きさになった所で、操作量を増やして偏差を無くすように動作させます。このようにして、比例動作に積分動作を加えた制御をPI制御(比例・積分制御)といいます。
PI制御(比例・積分制御)は、うまく制御が出来るように考えられていますが、目標値に合わせるためにはある程度の時間が必要になる特性があります。車の制御のように急な坂道や強い向かい風など、車速を大きく乱す外乱が発生した場合、PI制御(比例・積分制御)では偏差を時間経過で計測するので、元の値に戻すために時間が掛かってしまうので不都合な場合も出てきます。そこで、実はもう少しだけ改善の余地があります。もっとうまく制御が出来るように考えられたのが、PID制御(比例・積分・微分制御)です。
PID制御とは(比例・積分・微分制御)
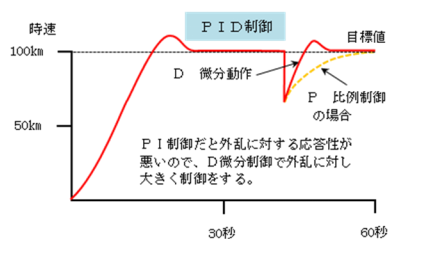
PI制御(比例・積分制御)には、もう少しだけ改善の余地があると説明しましたが、その改善とは応答時間です。PI制御(比例・積分制御)は「測定値=設定値」に制御できますが、応答するのに「一定の時間」が必要です。例えば「外乱」があった時には、すばやく反応できず、制御がきかない状態に陥ってしまうことがあります。尚、外乱とは制御を乱す外的要因のことです。
そこで、改善のために考えられたのが「D動作(微分動作)」です。微分動作は、今回の偏差と前回の偏差とを比較し、偏差の大小によって操作量を機敏に反応するようにする動作です。この前回との偏差の変化差をみることを「微分動作」といいます。
このようにして、比例動作に積分動作と微分動作を加えた制御を「PID制御(比例・積分・微分制御)」といいます。PID制御(比例・積分・微分制御)は操作量を機敏に反応し、素早く「測定値=設定値」になるような制御方式といえます。
制御ゲインとプロセスゲイン
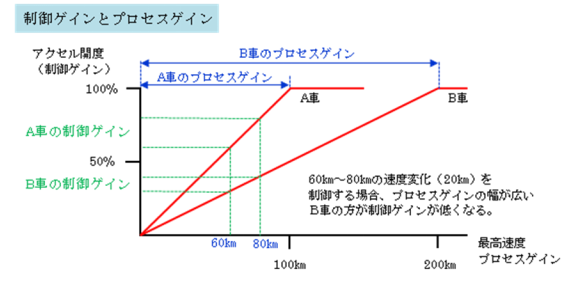
制御ゲインとは制御をする能力の事で、上図の例ではA車・B車共に時速60㎞~80㎞の間を調節する能力が制御ゲインです。まず、制御ゲインを考える前に必要になるのが、その制御する対象が一体どれ位の能力を持っているのかを知る必要があります。この能力(上図の場合は0㎞~最高速度まで)をプロセスゲインと表現します。
車が2台あり、A車が最高速度100㎞で、B車が200㎞だと仮定し、60㎞~80㎞までの間で速度を調節する場合はA車よりB車の方がアクセル開度を少なくして制御できるので、A車よりB車の方が制御ゲインは低いと言えます。
比例帯
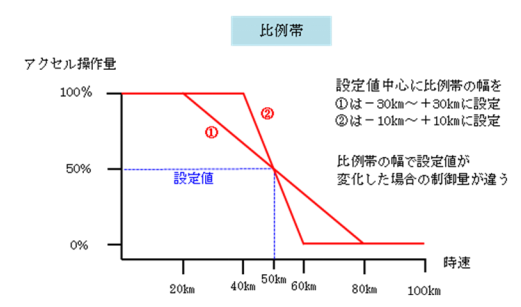
比例帯とは操作量を比例させる幅の意味で、上図を例にすると、時速50㎞の設定値を中心にして、どれだけの幅を設定するのかによって制御の特性が変化します。
比例帯の幅を①のように設定した場合は、時速50㎞を中心に±30㎞に設定してあるので、時速20㎞以下はアクセル全開、時速80㎞以上だとアクセルを全閉にして比例帯の範囲内に速度がある場合は設定値との偏差に比例して制御をします。
②の場合は時速50㎞を中心に±10㎞に設定していますから、時速40㎞以下はアクセル全開、時速60㎞以上だとアクセルを全閉にして比例帯の範囲内に速度がある場合は設定値との偏差に比例して制御をするので、①の設定では速度変化が緩やかになり、②の設定では速度変化が大きくなります。このように比例帯が広く設定されると、操作量の感度は下がるが安定性は良くなり、狭く設定した場合では感度は上がるが安定性は悪くなります。
比例制御では比例帯をどのように調整するかが重要なポイントだと言えます。