第三種電気主任技術者(電験三種)試験に独学で合格できるよう、分野ごとに「考え方」や「解き方」の解説と過去問題をまとめています。このページで、電験三種の機械科目に出題される「三相誘導電動機の運転」について、初心者の方でも解りやすく、基礎から勉強できます。また、電験三種の機械科目の試験で、実際に出題された「三相誘導電動機の運転」の過去問題も解説しています。
- 三相誘導電動機の始動法
- 速度制御法
- 三相巻線形誘導電動機の逆転
- 円線図
- 電験三種-機械の過去問解説:三相誘導電動機の運転
- 1998年(平成10年)問1
- 1998年(平成10年)問1 過去問解説
- 1999年(平成11年)問1
- 1999年(平成11年)問1 過去問解説
- 2002年(平成14年)問2
- 2002年(平成14年)問2 過去問解説
- 2003年(平成15年)問2
- 2003年(平成15年)問2 過去問解説
- 2006年(平成18年)問2
- 2006年(平成18年)問2 過去問解説
- 2006年(平成18年)問5
- 2006年(平成18年)問5 過去問解説
- 2006年(平成18年)問8
- 2006年(平成18年)問8 過去問解説
- 2009年(平成21年)問6
- 2009年(平成21年)問6 過去問解説
- 2011年(平成23年)問2
- 2011年(平成23年)問2 過去問解説
- 2014年(平成26年)問3
- 2014年(平成26年)問3 過去問解説
三相誘導電動機の始動法
始動時における三相誘導電動機は、二次側を短絡した変圧器と同じと考えられるので、一次側に定格電圧を加えると、大きな始動電流が流れます。とくに容量が大きな場合は、電動機が接続されている電源に対して、電圧降下などのわるい影響を与えます。したがって、始動電流を制限するために、いろいろな始動法が工夫されています。
全電圧始動法(直入れ始動法)
3.7kW以下の小容量のかご型誘導電動機では、配電線に対する影響も少ないので、直接定格電圧を加えて始動します。なお、始動電流は、定格電流の500~700% 程度です。
Y-△始動法
容量11kW程度までの三相かご形誘導電動機に用いられる方法で、図1(a)に示すように接続します。始動するときには切換スイッチSを始動側に閉じて、一次巻線をY結線にします。図(b),(b’)は、このときの内部接続を示したものです。次に、回転速度が増加したとき、Sを運転側に閉じると、一次巻線は、図 (c),(c’)に示すような△結線となります。この方法によると、始動のとき、各巻線の電圧は定格電圧の $\displaystyle\frac{1}{\sqrt{3}}$ となるので、線電流は、全電圧始動の $\displaystyle\frac{1}{\sqrt{3}}×\displaystyle\frac{1}{\sqrt{3}}$、つまり $\displaystyle\frac{1}{3}$ となり、始動電流は、定格電流の150~200%ぐらいに制限できます。しかし、トルクは、電圧の2乗に比例することから、始動トルクも $\displaystyle\frac{1}{3}$ に減少します。
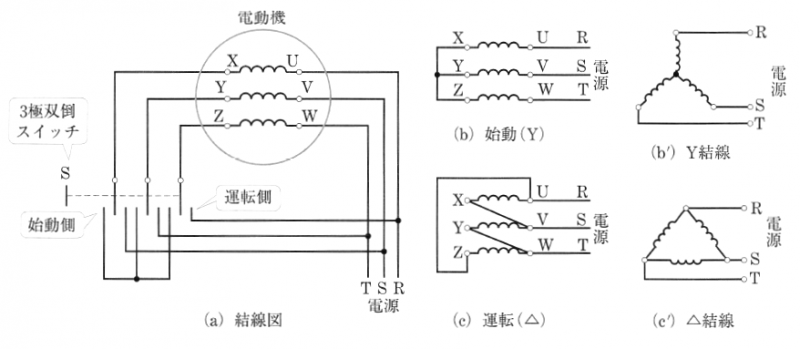
- 始動時の電圧は $\displaystyle\frac{1}{\sqrt{3}}$ に減少
- 始動時の電流とトルクは $\displaystyle\frac{1}{3}$ に減少
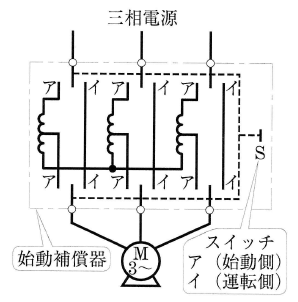
始動補償器法
容量15kW以上の三相かご形誘導電動機に用いられる方法で、図2に示す「始動補償器として三相単巻変圧器」を用います。変圧器のタップにより、始動時には定格電圧の40~80%の低電圧を加え、回転速度が増したら、運転側にスイッチを切り換えて全電圧を加えます。
リアクトル始動法
電源と誘導電動機の間にリアクトルを直列に挿入し、電圧を下げて始動させる方法です。回転速度が上がったらコイルを短絡し、コイルを通さずに誘導電動機に全電圧をかけます。
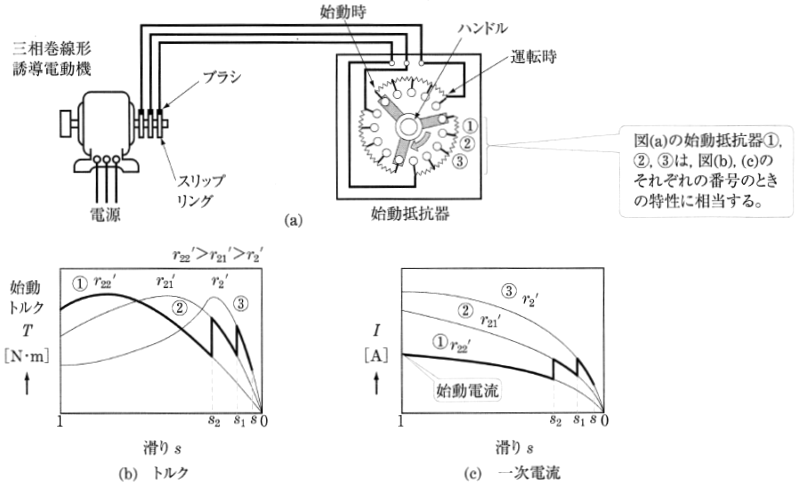
三相巻線形誘導電動機の始動法
三相巻線形誘導電動機では、図3(a)に示すように、スリップリングを通して、二次側に「始動抵抗器(三相可変抵抗器)」を接続して始動します。この方法では、図3(b),(c)に示すように、始動トルク $T$[N・m]を大きくし、小さな始動電流 $I$[A]で始動することができます。この場合の始動電流は、定格電流の110~150%ぐらいに制限しています。
速度制御法
誘導電動機の回転速度は、$n=n_s(1-s)=\displaystyle\frac{120f}{p}(1-s)$ で表わすことができますので、滑り $s$、極数 $p$ または、周波数 $f$ を変えれば、回転速度を変えることができます。したがって、誘導電動機の速度制御には、次に示す方法があります。
周波数による制御
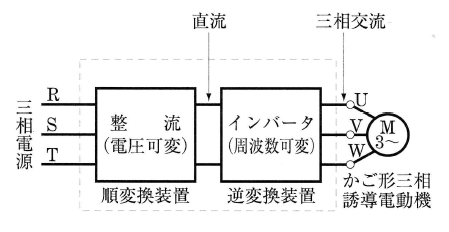
可変周波数電源を用いて、誘導電動機に加わる周波数を変えて速度制御を行います。周波数の可変装置には、可変電圧可変周波数電源装置(VVVF電源装置 )やサイクロコンバータなどがあります。
VVVF電源装置は、インバータによって直流電力を交流電力に変換し、可変周波数がつくられる電源です。誘導電動機を速度制御するには、電源周波数を可変したときもつねに発生トルクが一定になるように入力電圧も制御する必要があります。つまり、$\displaystyle\frac{V}{f}=一定$ という条件を備えた電源がVVVF電源装置です。図4はその構成図です。
最近はパワーエレクトロニクスの進歩で、大容量の電力用インバータが実用化され、大容量三相誘導電動機の速度制御も容易になっています。
巻線形誘導電動機の二次抵抗による制御
トルクの比例推移を利用して滑りを変えるもので、スリップリングを通して接続した抵抗を加減することによって速度制御ができます。この方法は、制御用の抵抗器を始動用に使える利点もありますが、抵抗器の損失が大きいので、効率がわるくなります。
一次電圧による制御
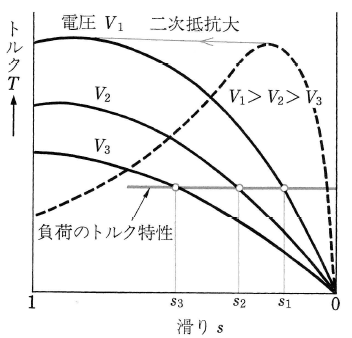
誘導電動機のトルクは電圧の 2乗に比例します。図5は、一次電圧を変えるときのトルク特性曲線で、電圧を $V_1,V_2,V_3$ と変えることにより、電動機の滑りを $s_1,s_2,s_3$ と変えることができます。滑りの変わる範囲を広くするには、二次抵抗 $r_2$[Ω]の値を大きく設計して、 トルク特性曲線の傾きをゆるやかにする必要があります。このため、二次銅損が大きくなり効率がわるいため、荷役用クレーンなど 50kW 程度以下の機器に用いられます。
極数変換による制御
かご形誘導電動機で、固定子巻線の接続を変更して極数を切り換えて速度制御します。この方法は、効率は良いのですが、速度の調整が段階的になってしまうという欠点があります。
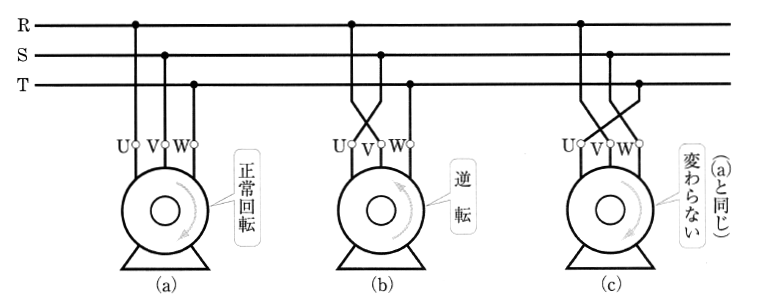
三相巻線形誘導電動機の逆転
誘導電動機の回転の向きは、図6(a)のように負荷が接続されていない側からみて時計まわりを標準としています。しかし、電動機の負荷の性質などから、逆回転させて使用することがあります。電動機の回転の向きを逆にするには、図6(b)のように3線のうち、いずれかの2線を入れ換えます。こうすれば、一次巻線に流れる三相交流の相回転が逆になり、回転磁界の回転の向きが逆になるため、電動機は逆転します。
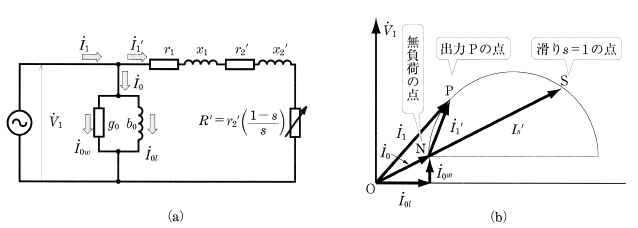
円線図
誘導電動機の特性を表す諸量を実際に求めるには、電気動力計を用いた実負荷試験法や簡易等価回路をもとにした円線図法によって求めます。円線図を用いると、誘導電動機に実際に負荷をかけないで、任意の負荷状態における特性を知ることができます。
円線図のかき方
円線図をかくには、無負荷試験・拘束試験・抵抗測定という三つの試験が必要です。
- 無負荷試験
無負荷試験では、無負荷入力、無負荷電流、電圧から無負荷電流の有効・無効分を計測します。
- 拘束試験
回転子を停止するのでs=1となり、二次側の回転子の損失はなくなるので、一次側の損失が測定できます。
- 抵抗測定
常温での抵抗測定を行い、これを運転中の温度に換算して、運転中の抵抗値を計測します。
この、三つの試験で計算した値を用いて、円の直径が 20cm以上となるように適当な尺度で作図します。こうしてかいた円線図より、与えられた電動機の任意の出力 P[kW]における特性を求めることができます。

電験三種-機械の過去問解説:三相誘導電動機の運転
(財)電気技術者試験センターが作成した、第三種電気主任技術者試験の機械科目で出題された問題です。
1998年(平成10年)問1
三相誘導電動機が一定電圧で運転中に周波数が下がると、回転速度は低下し、漏れリアクタンスは( ア )する。また、ギャップの磁束密度は( イ )し、励磁電流が増加して、力率が( ウ )する。
上記の記述中の空白の(ア),(イ)及び(ウ)に記入する記号又は字句として、正しいものを組み合わせたのは次のうちどれか。
| (ア) | (イ) | (ウ) | |
| (1) | 増大 | 減少 | 増大 |
| (2) | 減少 | 増大 | 減少 |
| (3) | 増大 | 増大 | 減少 |
| (4) | 減少 | 減少 | 増大 |
| (5) | 増大 | 減少 | 減 |
1998年(平成10年)問1 過去問解説
巻線の漏れリアクタンスは $2πfL$ で表されるので、周波数 $f$ が小さくなれば、漏れリアクタンスも小さくなります。ギャップの磁束は供給電圧が一定であれば、周波数と反比例の関係にあるので大きくなります。また、周波数が低くなれば、力率も低下します。
答え (2)
1999年(平成11年)問1
普通かご形誘導電動機の円線図は、簡単な試験結果から一次電流のベクトルに関する半円を描いて、電動機の特性を求めることに利用される。この円線図を描くには、次の三つの試験を行って基本量を求める必要がある。
- 抵抗測定では、任意の周囲温度において一次巻線の端子間で抵抗を測定し、( ア )における一次巻線の一相分の抵抗を求める。
- 無負荷試験では、誘導電動機を定格電圧、定格周波数、無負荷で運転し、無負荷電流と( イ )を測定し、無負荷電流の有効分と無効分を求める。
- c拘束試験では、誘導電動機の回転子を拘束し、一次巻線に定格周波数の低電圧を加えて定格電流を流し、一次電圧、一次入力を測定し、定格電圧を加えたときの( ウ )、拘束電流及び拘束電流の有効分と無効分を求める。
上記の記述中の空白箇所(ア),(イ)及び(ウ)に記入する字句として、正しいものを組み合わせたのは次のうちどれか。
| (ア) | (イ) | (ウ) | |
| (1) | 冷媒温度(基準周囲温度) | 無負荷入力 | 二次入力 |
| (2) | 冷媒温度(基準周囲温度) | 回転速度 | 一次入力 |
| (3) | 基準周囲温度 | 回転速度 | 二次入力 |
| (4) | 冷媒温度(基準周囲温度) | 回転速度 | 二次入力 |
| (5) | 基準周囲温度 | 無負荷入力 | 一次入力 |
1999年(平成11年)問1 過去問解説
- 抵抗測定では、任意の周囲温度において一次巻線の端子間で抵抗を測定し、( 基準周囲温度 )における一次巻線の一相分の抵抗を求める。
- 無負荷試験では、誘導電動機を定格電圧、定格周波数、無負荷で運転し、無負荷電流と( 無負荷入力 )を測定し、無負荷電流の有効分と無効分を求める。
- 拘束試験では、誘導電動機の回転子を拘束し、一次巻線に定格周波数の低電圧を加えて定格電流を流し、一次電圧、一次入力を測定し、定格電圧を加えたときの( 一次入力 )、拘束電流及び拘束電流の有効分と無効分を求める。
答え (5)
2002年(平成14年)問2
三相かご形誘導電動機に関する記述として、誤っているのは次のうちどれか。
- 始動時の二次周波数は、定常運転時の二次周波数よりも高い。
- 軽負荷時には、全負荷時より滑りが減少して回転速度はやや上昇する。
- 25%負荷時には、全負荷時より二次銅損が減少して効率は向上する。
- 機械損は負荷の大きさにかかわらずほぼ一定である。
- 負荷速度特性は、直流分巻電動機の負荷速度特性と類似している。
2002年(平成14年)問2 過去問解説
誘導電動機の損失には銅損と機械損があります。銅損は負荷の大きさに比例し、鉄損は負荷の大きさにかかわらずほぼ一定です。(3)の記述で、25%負荷時には、全負荷時より二次銅損が減少しますが、鉄損は出力に対する割合が大きくなりますので、効率は減少します。したがって、(3)の記述が誤りです。
答え (3)
2003年(平成15年)問2
三相誘導電動機に関する記述として、誤っているのは次のうちどれか。
- 極数変化による制御では、固定子巻線の接続を変化させる。
- 一次電圧による制御では、一次電圧を変化させることにより、電動機トルク特性極性と負荷トルク特性曲線との交点を移動させ、滑りを変化させる。
- 二次抵抗による制御では、巻線形誘導電動機において二次側端子に抵抗を接続し、この抵抗値を加減して滑りを変化させる。
- 一次周波数による制御では、誘導電動機の電源電圧を一定に保ちつつ、電源周波数を変化させて速度を制御する。
- 二次励磁による制御では、巻線形誘導電動機の二次回路に可変周波の可変電圧を外部から加え、これを変化させることにより、滑りを変化させる。
2003年(平成15年)問2 過去問解説
一次周波数による制御で、誘導電動機を速度制御するには、電源周波数を可変したときもつねに発生トルクが一定になるように入力電圧も制御する必要があります。したがって、(4)の記述が誤りです。
答え (4)
2006年(平成18年)問2
かご形誘導電動機の始動方法には、次のようなものがある。
- 定格出力が 5[kW]程度以下の小容量のかご形誘導電動機の始動時には、( ア )に与える影響が小さいので、直接電源電圧を印加する方法が用いられる。
- 定格出力が 5~15[kW]程度のかご形誘導電動機の始動時には、まず固定子巻線を( イ )にして電源電圧を加えて加速し、次に回転子の回転速度が定格回転速度近くに達したとき、固定子巻線を( ウ )に切り替える方法が用いられる。この方法では( ウ )で直接始動した場合に比べて、始動電流、始動トルクともに( エ )になる。
- 定格出力が 15[kW]程度以上のかご形誘導電動機の始動時には、まず、( オ )により、低電圧を電動機に供給し、回転子の回転速度が定格速度近くに達したとき、全電圧を電動機に供給する方法が用いられる。
上記の記述の空白箇所(ア),(イ),(ウ),(エ)及び(オ)に当てはまる語句として、正しいものを組み合わせたのは次のうちどれか。
| (ア) | (イ) | (ウ) | (エ) | (オ) | |
| (1) | 絶縁電線 | Δ結線 | Y結線 | 1/√3 | 三相単巻変圧器 |
| (2) | 電源系統 | Δ結線 | Y結線 | 1/√3 | 三相単巻変圧器 |
| (3) | 絶縁電線 | Y結線 | Δ結線 | 1/√3 | 三相可変抵抗器 |
| (4) | 電源系統 | Δ結線 | Y結線 | 1/3 | 三相可変抵抗器 |
| (5) | 電源系統 | Y結線 | Δ結線 | 1/3 | 三相単巻変圧器 |
2006年(平成18年)問2 過去問解説
- 定格出力が 5[kW]程度以下の小容量のかご形誘導電動機の始動時には、( 電源系統 )に与える影響が小さいので、直接電源電圧を印加する方法が用いられる。
- 定格出力が 5~15[kW]程度のかご形誘導電動機の始動時には、まず固定子巻線を( Y結線 )にして電源電圧を加えて加速し、次に回転子の回転速度が定格回転速度近くに達したとき、固定子巻線を( Δ結線 )に切り替える方法が用いられる。この方法では( Δ結線 )で直接始動した場合に比べて、始動電流、始動トルクともに( 1/3 )になる。
- 定格出力が 15[kW]程度以上のかご形誘導電動機の始動時には、まず、( 三相単巻変圧器 )により、低電圧を電動機に供給し、回転子の回転速度が定格速度近くに達したとき、全電圧を電動機に供給する方法が用いられる。
誘導電動機の始動電流は定格電流の 6倍近くありますが、小型の電動機では電源に与える影響が小さいので「直接」電圧を印加します。巻線をY結線にすると、コイルに加わる電圧は線間電圧より小さくなって、小さな電流が流れるので、巻線の焼損が防ぐことができます。
答え (5)
2006年(平成18年)問5
誘導電動機の回転速度 n[min-1]は、次式で与えられる。
n=(1-s)ns ここで、s は滑り、ns は同期速度である。
したがって、滑り、同期速度を変えると回転速度nを変えることができ、具体的には一般に以下の方法がある。
- ( ア )誘導電動機の( イ )回路の抵抗を変えて滑りを変化させる方法。この方法では( イ )回路の損失が大きい。
- 電源の( ウ )を変化させる方法。電動機の電源側にインバーターを設ける場合が多く、圧延機や工作機械等の広範囲な速度制限が用いられる。
- 固定子の同じスロットに( エ )の異なる上下2種類の巻線を設けてこれを別々に利用したり、1組の固定子巻線の接続を変更したりなどして、( エ )を変え、回転速度を( オ )的に変える方法。
上記の記述の空白箇所(ア),(イ),(ウ),(エ)及び(オ)に当てはまる語句として、正しいものを組み合わせたのは次のうちどれか。
| (ア) | (イ) | (ウ) | (エ) | (オ) | |
| (1) | かご形 | 一次 | 電圧 | 相数 | 連続 |
| (2) | 巻線形 | 二次 | 周波数 | 極数 | 段階 |
| (3) | かご形 | 一次 | 周波数 | 相数 | 段階 |
| (4) | 巻線形 | 一次 | 電圧 | 極数 | 段階 |
| (5) | 巻線形 | 二次 | 周波数 | 極数 | 連続 |
2006年(平成18年)問5 過去問解説
- ( 巻線形 )誘導電動機の( 二次 )回路の抵抗を変えて滑りを変化させる方法。この方法では( 二次 )回路の損失が大きい。
- 電源の( 周波数 )を変化させる方法。電動機の電源側にインバーターを設ける場合が多く、圧延機や工作機械等の広範囲な速度制限が用いられる。
- 固定子の同じスロットに( 極数 )の異なる上下2種類の巻線を設けてこれを別々に利用したり、1組の固定子巻線の接続を変更したりなどして、( 極数 )を変え、回転速度を( 段階 )的に変える方法。
抵抗が接続できるのは、巻線形の電動機です。周波数を変化させると、スムーズに回転数を変化させることができるが、極数を変化させると段階的な回転数の変化しかできません。
答え (2)
2006年(平成18年)問8
誘導電動機をVVVF(可変電圧可変周波数)インバータで駆動するものとする。このとき一般的な制御方法として( ア )が用いられる。いま、このインバータが 60[Hz]電動機用として、60[Hz]のときに 100[%]電圧で運転するように調整されていたものとする。このインバータを用いて、50[Hz]用電動機を 50[Hz]にて運転すると電圧は約( イ )[%]となる。トルクは電圧のほぼ( ウ )に比例するので、この場合の最大発生トルクは、定格印加時の最大トルクの約( エ )[%]となる。
上記の記述の空白箇所(ア),(イ),(ウ)及び(エ)に当てはまる語句として、正しいものを組み合わせたのは次のうちどれか。
| (ア) | (イ) | (ウ) | (エ) | |
| (1) | (V/f)一定制御 | 83 | 2乗 | 69 |
| (2) | (V/f)一定制御 | 83 | 3乗 | 57 |
| (3) | 電流一定制御 | 120 | 2乗 | 144 |
| (4) | 電圧一定制御 | 120 | 3乗 | 173 |
| (5) | 電圧一定制御 | 83 | 2乗 | 69 |
2006年(平成18年)問8 過去問解説
誘導電動機をVVVF(可変電圧可変周波数)インバータで駆動するものとする。このとき一般的な制御方法として( (V/f)一定制御 )が用いられる。いま、このインバータが 60[Hz]電動機用として、60[Hz]のときに 100[%]電圧で運転するように調整されていたものとする。このインバータを用いて、50[Hz]用電動機を 50[Hz]にて運転すると電圧は約( 83 )[%]となる。トルクは電圧のほぼ( 2乗 )に比例するので、この場合の最大発生トルクは、定格印加時の最大トルクの約( 69 )[%]となる。
60Hz-100%電圧を供給するインバーターを50Hz用電動機に供給すると電圧は50/60=0.83となります。また、トルクは電圧の2乗に比例します。
答え (1)
2009年(平成21年)問6
電気車を駆動する電動機として、直流電動機が広く使われてきた。近年、パワーエレクトロニクス技術の発展によって、電気車用駆動電動機の電源として、可変周波数・可変電圧の交流を発生することができるインバータを搭載する電気車が多くなった。そのシステムでは、構造が簡単で保守が容易な( ア )三相誘導電動機をインバータで駆動し、誘導電動機の制御方法として滑り周波数制御が広く採用されていた。電気車の速度を目標の速度にするためには、誘導電動機が発生するトルクを調節して電気車を加減速する必要がある。誘導電動機の回転周波数はセンサで検出されるので、回転周波数に滑り周波数を加算して得た( イ )周波数で誘導電動機を駆動することで、目標のトルクを得ることができる。電気車を始動・加速するときには( ウ )の滑りで運転し、回生制動によって減速するときには( エ )の滑りで運転する。最近はさらに電動機の制御技術が進展し、誘導電動機のトルクを直接制御することができる( オ )制御の採用が進んでいる。また、電気車用駆動電動機のさらなる小形・軽量化を目指して、永久磁石同期電動機を適用しようとする技術的動向がある。
上記の記途中の空白箇所(ア),(イ),(ウ),(エ)及び(オ)に当てはまる語句として、正しいものを組み合わせたのは次のうちどれか。
| (ア) | (イ) | (ウ) | (エ) | (オ) | |
| (1) | かご形 | 一次 | 正 | 負 | ベクトル |
| (2) | かご形 | 一次 | 負 | 正 | スカラ |
| (3) | かご形 | 二次 | 正 | 負 | スカラ |
| (4) | 巻線形 | 一次 | 負 | 正 | スカラ |
| (5) | 巻線形 | 二次 | 正 | 負 | ベクトル |
2009年(平成21年)問6 過去問解説
電気車を駆動する電動機として、直流電動機が広く使われてきた。近年、パワーエレクトロニクス技術の発展によって、電気車用駆動電動機の電源として、可変周波数・可変電圧の交流を発生することができるインバータを搭載する電気車が多くなった。そのシステムでは、構造が簡単で保守が容易な( かご形 )三相誘導電動機をインバータで駆動し、誘導電動機の制御方法として滑り周波数制御が広く採用されていた。電気車の速度を目標の速度にするためには、誘導電動機が発生するトルクを調節して電気車を加減速する必要がある。誘導電動機の回転周波数はセンサで検出されるので、回転周波数に滑り周波数を加算して得た( 一次 )周波数で誘導電動機を駆動することで、目標のトルクを得ることができる。電気車を始動・加速するときには( 正 )の滑りで運転し、回生制動によって減速するときには( 負 )の滑りで運転する。最近はさらに電動機の制御技術が進展し、誘導電動機のトルクを直接制御することができる( ベクトル )制御の採用が進んでいる。また、電気車用駆動電動機のさらなる小形・軽量化を目指して、永久磁石同期電動機を適用しようとする技術的動向がある。
周波数による制御
可変周波数電源を用いて、誘導電動機に加わる周波数を変えて速度制御を行います。周波数の可変装置には、可変電圧可変周波数電源装置(VVVF電源装置 )やサイクロコンバータなどがあります。
VVVF電源装置は、インバータによって直流電力を交流電力に変換し、可変周波数がつくられる電源です。誘導電動機を速度制御するには、電源周波数を可変したときもつねに発生トルクが一定になるように入力電圧も制御する必要があります。つまり、$\displaystyle\frac{V}{f}=一定$ という条件を備えた電源がVVVF電源装置です。
一次電圧による制御
誘導電動機のトルクは電圧の2乗に比例します。電圧を変えることにより,電動機の滑りを変えることができます。滑りの変わる範囲を広くするには、二次抵抗 $r_2$[Ω]の値を大きく設計して、 トルク特性曲線の傾きをゆるやかにする必要があります。このため、二次銅損が大きくなり効率がわるいため、荷役用クレーンなど50 kW程度以下の機器に用いられます。
ベクトル制御
交流電動機を流れる電流を、トルクを発生する電流成分と磁束を発生する電流成分とに分解し、それぞれの電流成分をおのおの制御する方式です。電動機の回転磁界の磁束の方向と大きさをベクトル量として制御でき、直流電動機のような速度制御が可能になります。
2011年(平成23年)問2
次の文章は, 誘導電動機の始動に関する記述である。
- 三相巻線形誘導電動機は、二次回路を調整して始動する。 トルクの比例推移特性を利用して、トルクが最大値となる滑りを( ア )付近になるようにする。具体的には、二次回路を( イ )で引き出して抵抗を接続し、二次抵抗値を定格運転時よりも大きな値に調整する。
- 三相かご形誘導電動機は、一次回路を調整して始動する。 具体的には、始動時はY結線、通常運転時は△結線にコイルの接続を切り替えてコイルに加わる電圧を下げて始動する方法、( ウ )を電源と電動機の間に挿入して始動時の端子電圧を下げる方法、及び( エ )を用いて電圧と周波数の両者を下げる方法がある。
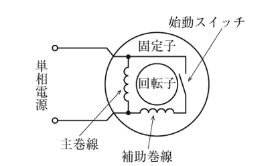
- 三相誘導電動機では、三相コイルが作る磁界は回転磁界である。一方、単相誘導電動機では、単相コイルが作る磁界は交番磁界であり、主コイルだけでは始動しない。そこで、主コイルとは( オ )が異なる電流が流れる補助コイルやくま取りコイルを固定子に設けて、回転磁界や移動磁界を作って始動する。
上記の記述中の空白箇所(ア),(イ),(ウ),(エ)及び(オ)に当てはまる組合せとして、正しいものを次の(1)~(5)のうちから一つ選べ。
| (ア) | (イ) | (ウ) | (エ) | (オ) | |
| (1) | 1 | スリップリング | 始動補償器 | インバータ | 位相 |
| (2) | 0 | 整流子 | 始動コンデンサ | 始動補償器 | 位相 |
| (3) | 1 | スリップリング | 始動補償器 | 始動コンデンサ | 周波数 |
| (4) | 0 | 整流子 | 始動コンデンサ | 始動補償器 | 位相 |
| (5) | 1 | スリップリング | 始動補償器 | インバータ | 周波数 |
2011年(平成23年)問2 過去問解説
- 三相巻線形誘導電動機は、二次回路を調整して始動する。 トルクの比例推移特性を利用して、トルクが最大値となる滑りを( 1 )付近になるようにする。具体的には、二次回路を( スリップリング )で引き出して抵抗を接続し、二次抵抗値を定格運転時よりも大きな値に調整する。
- 三相かご形誘導電動機は、一次回路を調整して始動する。 具体的には、始動時はY結線、通常運転時は△結線にコイルの接続を切り替えてコイルに加わる電圧を下げて始動する方法、( 始動補償器 )を電源と電動機の間に挿入して始動時の端子電圧を下げる方法、及び( インバータ )を用いて電圧と周波数の両者を下げる方法がある。
- 三相誘導電動機では、三相コイルが作る磁界は回転磁界である。一方、単相誘導電動機では、単相コイルが作る磁界は交番磁界であり、主コイルだけでは始動しない。そこで、主コイルとは( 位相 )が異なる電流が流れる補助コイルやくま取りコイルを固定子に設けて、回転磁界や移動磁界を作って始動する。
単相誘導電動機では、主コイルだけでは始動しません。そこで、主コイルとは位相が異なる電流が流れる補助コイルやくま取りコイルを固定子に設けて、主巻線が作る磁界に対して、位相が異なるようにしています。補助コイルやくま取りコイルには、始動時のみ電流を流し、始動後はスイッチを切ります。
答え (1)
2014年(平成26年)問3
次の文章は、三相かご形誘導電動機に関する記述である。
定格負荷時の効率を考慮して二次抵抗値は、できるだけ( ア )する。滑り周波数が大きい始動時には、かご形回転子の導体電流密度が( イ )となるような導体構造(たとえば深溝形)にして、始動トルクを大きくする。定格負荷時は、無負荷時より( ウ )であり、その差は( エ )。このことから三相かご形誘導電動機は( オ )電動機と称することができる。
上記の記述中の空白箇所(ア),(イ),(ウ),(エ)及び(オ)に当てはまる組合せとして、正しいものを次の(1)~(5)のうちから一つ選べ。
| (ア) | (イ) | (ウ) | (エ) | (オ) | |
| (1) | 小さく | 不均一 | 低速度 | 小さい | 定速度 |
| (2) | 大きく | 不均一 | 低速度 | 大きい | 変速度 |
| (3) | 小さく | 均一 | 低速度 | 小さい | 定速度 |
| (4) | 大きく | 均一 | 高速度 | 大きい | 変速度 |
| (5) | 小さく | 不均一 | 高速度 | 小さい | 変速度 |
2014年(平成26年)問3 過去問解説
定格負荷時の効率を考慮して二次抵抗値は、できるだけ( 小さく )する。滑り周波数が大きい始動時には、かご形回転子の導体電流密度が( 不均一 )となるような導体構造(たとえば深溝形)にして、始動トルクを大きくする。定格負荷時は、無負荷時より( 低速度 )であり、その差は( 小さい )。このことから三相かご形誘導電動機は( 定速度 )電動機と称することができる。
深溝かご形誘導電動機は、回転子の深いスロットに幅の狭い平たい導体を押し込んで作られます。このような構造とすることで、回転子導体の電流密度は定常時に比べて始動時は導体の外側(回転子表面側)と内側(回転子中心側)で不均一の度合いが増加し、等価的に二次導体のインピーダンスが増加することになり、始動トルクが増加します。
答え (1)
電験三種の機械科目に出題される「誘導機」のページ
- 三相誘導電動機の原理と構造
- 三相誘導電動機の理論と等価回路
- 三相誘導電動機の特性
- 三相誘導電動機の運転