このページでは、自動制御の基礎知識について、初心者の方でも解りやすいように、基礎から解説しています。また、電験三種の機械科目の試験で実際に出題された、自動制御の基礎知識の過去問題も解説しています。
- 自動制御とは
- フィードバック制御
- フィードフォワード制御
- 自動制御の方式
- プロセス制御とサーボ制御
- 電験三種-機械(自動制御)過去問
- 1997年(平成9年)問9
- 1997年(平成9年)問9 過去問解説
- 1999年(平成11年)問9
- 1999年(平成11年)問9 過去問解説
- 2000年(平成12年)問7
- 2000年(平成12年)問7 過去問解説
- 2001年(平成13年)問9
- 2001年(平成13年)問9 過去問解説
- 2002年(平成14年)問9
- 2002年(平成14年)問9 過去問解説
- 2003年(平成15年)問13
- 2003年(平成15年)問13 過去問解説
- 2004年(平成16年)問13
- 2004年(平成16年)問13 過去問解説
- 2009年(平成21年)問13
- 2009年(平成21年)問13 過去問解説
- 2011年(平成23年)問13
- 2011年(平成23年)問13 過去問解説
- 2014年(平成26年)問13
- 2014年(平成26年)問13 過去問解説
- 2016年(平成28年)問13
- 2016年(平成28年)問13 過去問解説
自動制御とは
自動制御を大きく分類すると「シーケンス制御」と「フィードバック制御」に分けることができます。
シーケンス制御は、「あらかじめ定められた順序または手続きに従って制御の各段階を逐次進めていく制御」のことをいいます。
フィードバック制御は、「検出器やセンサーからの信号を読み取り、目標値と比較しながら設備機器を運転し、目標値に近づける制御」のことをいいます。
シーケンス制御は、次の記事に詳しく紹介しています。

自動制御の分類
- 目標値の時間的性質による分類
- 定値制御:目標値が変化しないで一定
- 追値制御:目標値が時間経過と伴に変化する
- 追従制御:目標値が時間的に任意に変化する場合の制御
- 比率制御:目標値が他の量と一定の比率で変化する制御
- プログラム制御:目標値が時間経過と共にあらかじめ定められた値に変化する制御
- 使用分野による分類
- 自動調整:目標値が一定の定値制御
- プロセス制御:制御量が温度,流量,圧力などのプロセス量の制御
- サーボ制御:追従制御で、制御量が機械的位置,回転角などを主体とする制御
- 制御量の数による分類
- 複合制御:制御量の干渉がない、または、一方向の制御(比例制御など)
- 結合制御:制御量の干渉がある制御(カスケード制御など)
- 操作エネルギーによる分類
- 自力制御:制御対象から検出部を通して操作動力を直接得る制御
- 他力制御:補助電源(制御電源)から操作動力を得る制御
自動制御の特性
自動制御系では、目標値の変化や外乱に対して、制御系の安定性が要求されます。制御系の特性を評価するものとしては、定常特性と過渡特性があります。
定常特性
時間応答の中で、十分に時間が経過して安定したときの状態を定常状態といいます。この、定常状態における特性を定常特性といいます。
定常特性は、定常状態の精度のことで、安定性や速応性を問題にするのと同じように、重要な特性とされています。定常特性は、主として、偏差量(定常偏差)に着目して、制御量が目標値とどの程度一致しているかによって決まります。
過渡特性
時間応答の中で、十分に時間が経過する前の過渡期の状態を過渡状態といいます。この、過渡状態における特性を過渡特性といいます。
過渡特性は、定常状態と同様に速応性や安定性を検討するうえで、重要な特性です。過渡特性は、主として、ステップ応答波形の形に着目し、制御量が目標値に近づいていく過程で、どのような動きを示すかによって決まります。
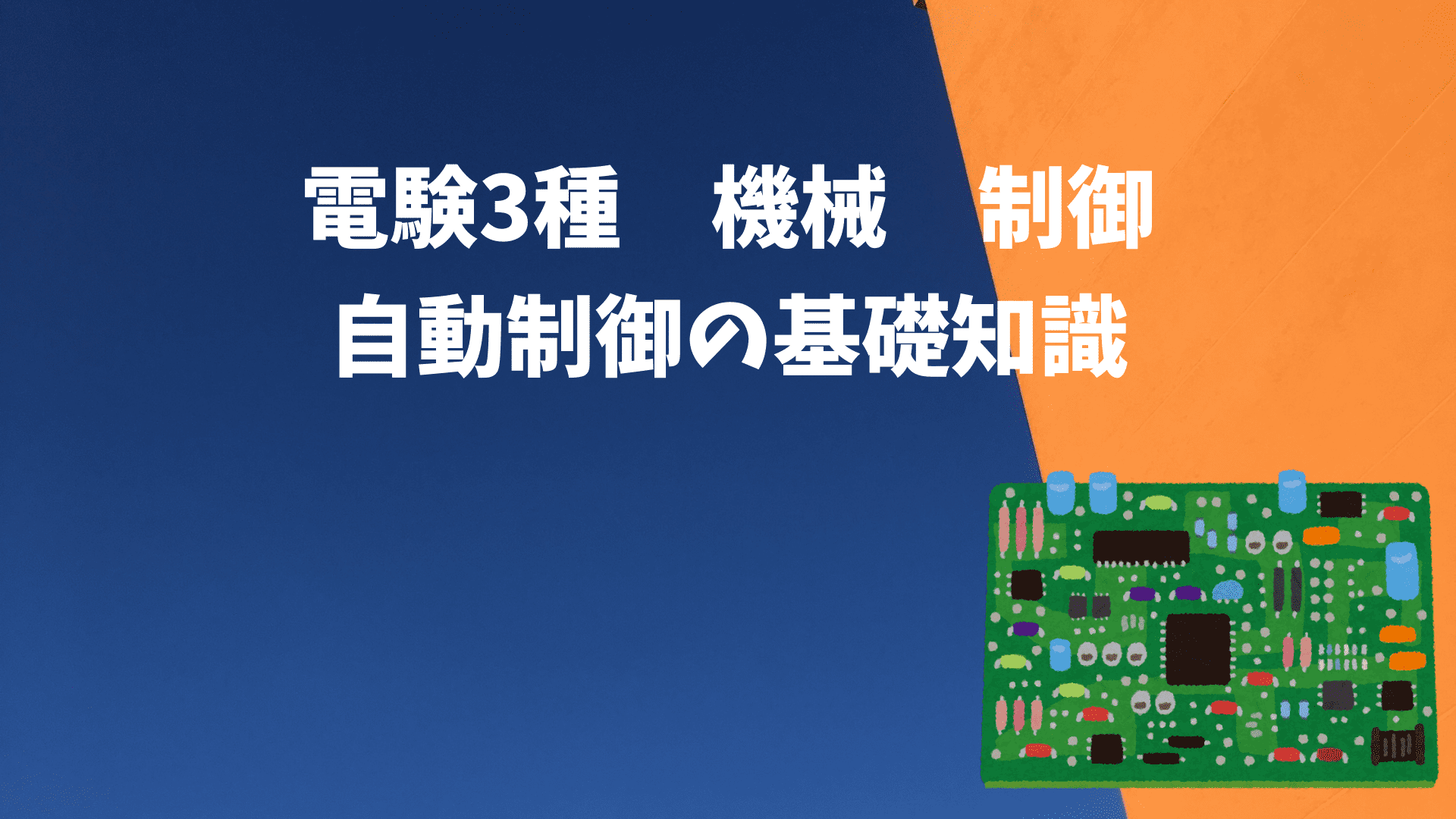
ステップ応答とインディシャル応答
入力がある一定の値からほかの一定の値に瞬間的に変化したときの応答を「ステップ応答」といい、入力側に単位ステップ入力を印加したとき、出力側の時間応答を「インディシャル応答」といいます。一般には、両者を同じ意味で使っています。
ステップ応答の振動を示す波形で、最初に現れる最大値と、応答の最終値との比を百分率で表したものを「最大行過ぎ量(オーバシュート)」といいます。オーバシュートは、安定度の目安として用いられる量です。
- 遅れ時間:目標値の50%に達するまでの時間
- 立ち上がり時間:目標値の10%から90%に達するまでの時間
- 行過ぎ時間:出力が最大値に達するまでの時間
- 整定時間:出力が目標値の5%以内に収まるまでの時間(95~105%内に収まるまでの時間)
- 行過ぎ量:目標値を超えて行過ぎたその最大値と目標値 との差
- 過渡特性領域:整定時間まで(出力の波形が安定するまで)の特性を「過渡特性」といい、この領域を過渡特性領域といいます。
- 定常特性領域:整定時間を過ぎて、出力の波形が安定した後の特性を「定常特性」といい、この領域を定常特性領域といいます。
フィードバック制御
自動制御は制御方式により、閉ループ制御と開ループ制御の2 つに大きく分類することができます。「閉ループ制御」はフィードバック制御ともいわれています。
フィードバック制御は、フィードバック(出力結果を入力にもどすこと)によって測定値を目標値と比較し、測定値と目標値を一致させえるような訂正動作を行う制御です。
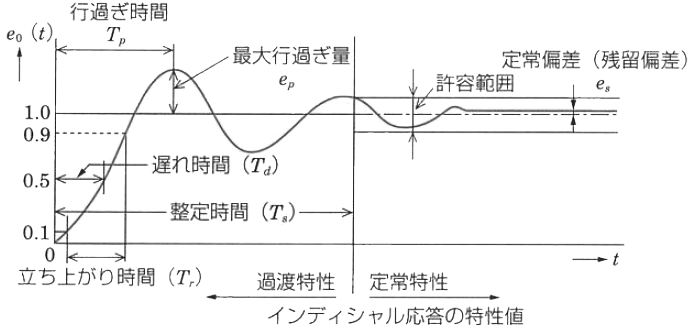
フィードバック制御系の構成
フィードバック制御系は、次の図のように各要素から構成されています。矢印は信号の流れを示しています。
- 基準入力要素
目標値を基準入力信号(電流や電圧など、制御要素を操作する信号)に変換する要素
- 制御要素
コントローラなどの制御系を構成する要素
- 制御対象
制御される装置
- フィードバック要素
被制御量を基準入力信号と比較できる信号に変換する要素
- 目標値
制御量が希望する値をとるように、目標として外部から与える値
- 設定部
目標値を基準信号に変換する
- 調節計
基準入力信号から主フィードバック信号を差し引き、制御動作信号を送る
- 調節部
動作信号を元に制御系が所要の働きをするための信号を作る
- 操作部
調節部からの信号を操作に必要な信号に変換する
- 外乱
制御系を乱そうとする外部からの作用
- 制御量
制御しようとする量(温度,圧力,位置,電圧など)
- 検出部
制御量を検出し、基準入力信号と同種の物理量に変換する
フィードバック制御の動作順序
- 制御対象の出力である制御量を検出部で検出する
- 検出した信号をフィードバックとして制御装置に戻す
- フィードバックを設定部の基準入力要素と比較して、その偏差(動作信号)が調節部に入力され、偏差に応じた操作信号を操作部に送る
- 偏差量が小さくなるように1~4の動作が繰り返される
- その結果、制御量は次第に目標値に近づく
フィードフォワード制御
フィードバック制御の欠点を補うために用いられるのがフィードフォワード制御です。フィードフォワード制御は、外乱による影響が現れる前に、修正動作を行う制御方式ですので、「外乱を検知する手段」と「外乱検知時に操作量の決定」が必要です。外乱の影響がどういうメカニズムで制御を乱すかを解析し、適切な修正量の決定を行います。
フィードフォワード制御は、信号の流れが、「外乱の検知」→「操作量の決定」という一方向の制御方式です。そのため、フィードフォワード制御だけでは設定温度を保つことができないので、通常はフィードバック制御と併用します。
フィードフォワード制御単体は、「開ループ制御 (オープンループ) 」になります。

自動制御の方式
自動制御方式において、一番単純なシステムに「オンオフ制御」という方式があります。オンオフ制御は検出器やセンサーからの信号を読み取り、目標値と比較しながら設備機器の運転や停止をして目標値に近づける命令です。
オンオフ制御よりも、制御結果の精度を上げる自動制御として、比例制御というものがあります。比例制御では、SV(設定値)を中心とした比例帯をもち、MV(操作量)が e(偏差)に比例する動作をします。比例制御を行うための演算方式として、「PIDという3つの動作」を組み合わせて、スムーズな制御を行っています。
- P動作:Proportinal(比例動作)
- I動作:Integral(積分動作)
- D動作:Differential(微分動作)
PID制御は、比例動作を主体として、積分動作で定常特性の改善を行い、微分動作で過渡特性の改善を行う制御方式です。
比例動作 (P動作)
偏差(目標値と制御量の差) に比例して操作量を変化させる制御動作のことを比例動作といいます。比例動作では、偏差の大きさに比例して操作量が変化するため、偏差が小さくなると操作量も比例して小さくなります。
そのため、比例動作だけでは目標値と制御量を完全に一致させることができない、という特性があります。このときの目標値と制御量の差のことを「定常偏差 (オフセット)」といいます。

積分動作 (I動作)
比例動作で発生する定常偏差を解消するために、比例動作と組み合わせて積分動作が用いられます。積分動作は定常偏差を無くす働きがあります。
比例動作と積分動作を組み合わせると目標値と制御量を一致させることができるので、定常偏差を無くすことができます。比例動作と積分動作を組み合わせた出力の応答波形は、次のようになります。

微分動作 (D動作)
外乱などにより偏差が大きく変化するような場合、その変化の度合いに応じて変化量を予測し、操作量を調節する動作を「微分動作」といいます(偏差の起こりはじめに大きな操作量を与える動作をします)。
微分動作により、偏差が大きくなりすぎることを防ぐことができます(偏差を早く減衰させる効果があります)。

プロセス制御とサーボ制御
プロセス制御とは
温度,流量,圧力,レベル,濃度など、工業プロセスの状態量を操作する制御をプロセス制御といいます。プロセスとは工程の意味ですが、制御の分野では、加工組立工程と製造工程を区別して、加工組立工程で行う制御をシーケンス制御、製造工程で行う制御をプロセス制御と呼んでいます。
化学産業や装置産業などにおいては、生産工程に重要な圧力,温度,流量等のプロセス変量を一定に保ったり、あらかじめ設定された計画に沿って自動化する制御を行っています。
サーボ制御
物体の位置や方位,姿勢などを制御量とし、目標値の任意の変化に追従するように制御する機構をサーボ機構といいます。また、機械制御ともいいます。サーボ機構では、フィードバック制御を行うのが一般的です。

電験三種-機械(自動制御)過去問
1997年(平成9年)問9
外乱があまりない系ではシーケンス制御のような( ア )制御で十分であるが、外乱の影響が大きく制御量の変動が大きな系では( イ )制御しなければならない。また、外乱が制御量の変化として検出されるのが遅い系では、外乱の影響を前向き経路により補償する( ウ )制御が用いられる。
上記の記述中の空白の(ア),(イ)及び(ウ)に記入する字句として、正しいものを組み合わせたのは次のうちどれか。
| (ア) | (イ) | (ウ) | |
| (1) | オン・オフ | フィードフォワード | オープンループ |
| (2) | オープンループ | フィードフォワード | フィードバック |
| (3) | フィードフォワード | フィードバック | オン・オフ |
| (4) | フィードフォワード | オン・オフ | フィードバック |
| (5) | オープンループ | フィードバック | フィードフォワード |
1997年(平成9年)問9 過去問解説
外乱があまりない系ではシーケンス制御のような( オープンループ )制御で十分であるが、外乱の影響が大きく制御量の変動が大きな系では( フィードバック )制御しなければならない。また、外乱が制御量の変化として検出されるのが遅い系では、外乱の影響を前向き経路により補償する( フィードフォワード )制御が用いられる。
答え (5)
1999年(平成11年)問9
プロセス制御にはPID制御が非常によく用いられている。その中で積分動作は主として( ア )特性の改善に、微分動作は( イ )特性の改善に有効であり、また、( ウ )動作は両方の特性を、ともにある程度改善することができる。これらの動作をディジタル処理で行うDDCが最近よく用いられている。
上記の記述中の空白箇所(ア),(イ)及び(ウ)に記入する字句として、正しいものを組み合わせたのは次のうちどれか。
| (ア) | (イ) | (ウ) | |
| (1) | 定常 | 過渡 | 加算 |
| (2) | 定常 | 過渡 | 減算 |
| (3) | 過渡 | 定常 | 比例 |
| (4) | 過渡 | 定常 | 加算 |
| (5) | 定常 | 過渡 | 比例 |
1999年(平成11年)問9 過去問解説
プロセス制御にはPID制御が非常によく用いられている。その中で積分動作は主として( 定常 )特性の改善に、微分動作は( 過渡 )特性の改善に有効であり、また、( 比例 )動作は両方の特性を、ともにある程度改善することができる。これらの動作をディジタル処理で行うDDCが最近よく用いられている。
答え (5)
2000年(平成12年)問7
サーボ機構は、目標値の変化に対する ( ア ) 制御であり、その過渡特性が良好であることが要求される。一方、プロセス制御は、目標値が一定の ( イ ) 制御が一般的であり、外乱に対する抑制効果を ( ウ ) する場合が多い。しかし、プロセス制御でも比率制御や ( エ ) 制御のように目標値に対する追値制御もあるが、過渡特性に対する要求はサーボ機構ほど厳しくはない。
上記の記述中の空白箇所(ア),(イ),(ウ)及び(エ)に記入する語句として、正しいものを組み合わせたのは次のうちどれか。
| (ア) | (イ) | (ウ) | (エ) | |
| (1) | 追従 | 定値 | 無視 | シーケンス |
| (2) | 追値 | 多値 | 無視 | プログラム |
| (3) | 追値 | 多値 | 重視 | シーケンス |
| (4) | 追従 | 定値 | 重視 | プログラム |
| (5) | 追従 | 多値 | 無視 | プログラム |
2000年(平成12年)問7 過去問解説
サーボ機構は、目標値の変化に対する ( 追従 ) 制御であり、その過渡特性が良好であることが要求される。一方、プロセス制御は、目標値が一定の ( 定値 ) 制御が一般的であり、外乱に対する抑制効果を ( 重視 ) する場合が多い。しかし、プロセス制御でも比率制御や ( プログラム ) 制御のように目標値に対する追値制御もあるが、過渡特性に対する要求はサーボ機構ほど厳しくはない。
答え (4)
2001年(平成13年)問9
自動制御系において、一次遅れ要素は最も基本的な要素であり、その特性はゲインKと時定数Tで記述できる。( ア )応答において、ゲインKは応答の定常値から求められ、また、時定数Tは応答曲線の初期傾斜の接線が( イ )を表す直線と交わるまでの時間として求められる。電気系のみならず機械系、圧力系、熱系などのシステムにも、電気系の抵抗と静電容量に相当する量が存在する。それらが一つの抵抗に相当するものと一つの静電容量に相当するものから成るとき、これらは一次遅れ要素として働き、両者の( ウ )は時定数T(単位は[( エ )])に等しくなる。
上記の記述中の空白箇所(ア)、(イ)、(ウ)及び(エ)に記入する字句又は数値として、正しいものを組み合わせたのは次のうちどれか。
| (ア) | (イ) | (ウ) | (エ) | |
| (1) | ステップ | 定常値 | 積 | s |
| (2) | インパルス | 定常値 | 積 | s-1 |
| (3) | ステップ | 定常値 | 比 | s-1 |
| (4) | ステップ | 入力値 | 比 | s-1 |
| (5) | インパルス | 入力値 | 積 | s |
2001年(平成13年)問9 過去問解説
自動制御系において、一次遅れ要素は最も基本的な要素であり、その特性はゲインKと時定数Tで記述できる。( ステップ )応答において、ゲインKは応答の定常値から求められ、また、時定数Tは応答曲線の初期傾斜の接線が( 定常値 )を表す直線と交わるまでの時間として求められる。電気系のみならず機械系、圧力系、熱系などのシステムにも、電気系の抵抗と静電容量に相当する量が存在する。それらが一つの抵抗に相当するものと一つの静電容量に相当するものから成るとき、これらは一次遅れ要素として働き、両者の( 積 )は時定数T(単位は[( s )])に等しくなる。
RC直列回路における時定数をT、とすると、T=RC[s]となり、一次遅れ要素の応答は、ステップ入力に対してk(1-ε(-t/T))で示される。
答え (1)
2002年(平成14年)問9
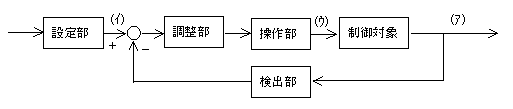
図は、制御系の基本的構成を示す。制御対象の出力信号である。( ア )が検出部によって検出される。その検出部の出力が比較器で( イ )と比較され、その差が調整部に加えられる。その調整部の出力によって操作部で( ウ )が決定され、制御対象に加えられる。このような制御方式を( エ )制御と呼ぶ。
上記の記述中の空白箇所(ア),(イ),(ウ)及び(エ)に記入する語句として、正しいものを組み合わせたのは次のうちどれか。ただし、(ア),(イ)及び(ウ)は図中のそれぞれに対応している。
| (ア) | (イ) | (ウ) | (エ) | |
| (1) | 制御量 | 基準入力 | 偏差値 | フィードバック |
| (2) | 操作量 | 基準入力 | 制御量 | フィードフォワード |
| (3) | 制御量 | 偏差値 | 操作量 | フィードバック |
| (4) | 操作量 | 偏差値 | 制御量 | フィードフォワード |
| (5) | 制御量 | 基準入力 | 操作量 | フィードバック |
2002年(平成14年)問9 過去問解説
図は、制御系の基本的構成を示す。制御対象の出力信号である。( 制御量 )が検出部によって検出される。その検出部の出力が比較器で( 基準入力 )と比較され、その差が調整部に加えられる。その調整部の出力によって操作部で( 操作量 )が決定され、制御対象に加えられる。このような制御方式を( フィードバック )制御と呼ぶ。
答え (5)
2003年(平成15年)問13
一般にフィードバック制御系においては、制御系の安定性が要求され、制御系の特性を評価するものとして、( ア )特性と過渡特性がある。 サーボ制御系では、目標値の変化に対する追従性が重要であり、過渡特性を評価するものとして、( イ )応答の遅れ時間、立ち上がり時間、( ウ )などが用いられる。
上記の記述中の空白箇所(ア),(イ)及び(ウ)に記入する語句として、正しいものを組合わせたものは次のうちどれか。
| (ア) | (イ) | (ウ) | |
| (1) | 定常 | ステップ | 定常偏差 |
| (2) | 追従 | ステップ | 定常偏差 |
| (3) | 追従 | インパルス | 行き過ぎ量 |
| (4) | 定常 | ステップ | 行き過ぎ量 |
| (5) | 定常 | インパルス | 定常偏差 |
2003年(平成15年)問13 過去問解説
一般にフィードバック制御系においては、制御系の安定性が要求され、制御系の特性を評価するものとして、( 定常 )特性と過渡特性がある。 サーボ制御系では、目標値の変化に対する追従性が重要であり、過渡特性を評価するものとして、( ステップ )応答の遅れ時間、立ち上がり時間、( 行き過ぎ量 )などが用いられる。
答え (4)
2004年(平成16年)問13
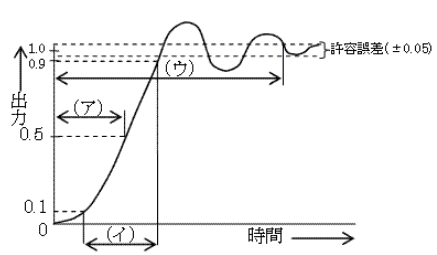
あるフィードバック制御系にステップ入力を加えたとき、出力の過渡応答す図のようになった。図中の過渡応答の時間に関する諸量(ア),(イ)及び(ウ)に記入する語句として、正しいものを組み合わせたのは次のうちどれか。
| (ア) | (イ) | (ウ) | |
| (1) | 遅れ時間 | 立上り時間 | 減衰時間 |
| (2) | むだ時間 | 応答時間 | 減衰時間 |
| (3) | むだ時間 | 立上り時間 | 整定時間 |
| (4) | 遅れ時間 | 立上り時間 | 整定時間 |
| (5) | むだ時間 | 応答時間 | 整定時間 |
2004年(平成16年)問13 過去問解説
(ア)は遅れ時間、(イ)は立上り時間、(ウ)は整定時間です。
答え (4)
2009年(平成21年)問13
自動制御系には、フィードフォワード制御系とフィードバック制御系がある。
常に制御対象の( ア )に着目し、これを時々刻々検出し、( イ )との差を生じればその差を零にするような操作を制御対象に加える制御が( ウ )制御系である。外乱によって( ア )に変動が生じれば、これを検出し修正動作を行うことが可能である。この制御システムは( エ )を構成するが、一般には時間的な遅れを含む制御装置を( エ )内に含むため、安定性の面で問題を生じることもある。しかしながら、はん用性の面で優れているため、定置制御や追値制御を実現する場合、基本になる制御である。
上記の記述中の空白箇所(ア),(イ),(ウ)及び(エ)に当てはまる語句として、正しいものを組み合わせたのは次のうちどれか。
| (ア) | (イ) | (ウ) | (エ) | |
| (1) | 操作量 | 入力信号 | フィードフォワード | 閉ループ |
| (2) | 制御量 | 目標値 | フィードフォワード | 開ループ |
| (3) | 操作量 | 目標値 | フィードバック | 開ループ |
| (4) | 制御量 | 目標値 | フィードバック | 閉ループ |
| (5) | 操作量 | 入力信号 | フィードバック | 閉ループ |
2009年(平成21年)問13 過去問解説
自動制御系には、フィードフォワード制御系とフィードバック制御系がある。
常に制御対象の( 制御量 )に着目し、これを時々刻々検出し、( 目標値 )との差を生じればその差を零にするような操作を制御対象に加える制御が( フィードバック )制御系である。外乱によって( 制御量 )に変動が生じれば、これを検出し修正動作を行うことが可能である。この制御システムは( 閉ループ )を構成するが、一般には時間的な遅れを含む制御装置を( 閉ループ )内に含むため、安定性の面で問題を生じることもある。しかしながら、はん用性の面で優れているため、定置制御や追値制御を実現する場合、基本になる制御である。
答え (4)
2011年(平成23年)問13
次の文章は、自動制御に関する記述である。
機械、装置及び製造ラインの運転や調整などを制御装置によって行うことを自動制御という。 自動制御は、シーケンス制御と( ア )制御とに大別される。
シーケンス制御は、あらかじめ定められた手順や判断によって制御の各段階を順に進めていく制御である。この制御を行うための機器として電磁リレーがある。電磁リレーを用いた( イ )シーケンス制御をリレーシーケンスという。
リレーシーケンスにおいて、2個の電磁リレーのそれぞれのコイルに、相手のb接点を直列に接続して、両者が決して同時に働かないようにすることを( ウ )という。
シーケンス制御の動作内容の確認や、制御回路設計の手助けのために、横軸に時間を表し, 縦軸にコイルや接点の動作状態を表したものを( エ )という。
上記の記述中の空白箇所(ア),(イ),(ウ)及び(エ)に当てはまる組合せとして、正しいものを次の(1)~(5)のうちから一つ選べ。
| (ア) | (イ) | (ウ) | (エ) | |
| (1) | フィードバック | 有接点 | インタロック | タイムチャート |
| (2) | フィードフォワード | 無接点 | ブロック | フローチャート |
| (3) | フィードバック | 有接点 | ブロック | フローチャート |
| (4) | フィードフォワード | 有接点 | インタロック | タイムチャート |
| (5) | フィードバック | 無接点 | ブロック | タイムチャート |
2011年(平成23年)問13 過去問解説
機械、装置及び製造ラインの運転や調整などを制御装置によって行うことを自動制御という。 自動制御は、シーケンス制御と( フィードバック )制御とに大別される。
シーケンス制御は、あらかじめ定められた手順や判断によって制御の各段階を順に進めていく制御である。この制御を行うための機器として電磁リレーがある。電磁リレーを用いた( 有接点 )シーケンス制御をリレーシーケンスという。
リレーシーケンスにおいて、2個の電磁リレーのそれぞれのコイルに、相手のb接点を直列に接続して、両者が決して同時に働かないようにすることを( インタロック )という。
シーケンス制御の動作内容の確認や、制御回路設計の手助けのために、横軸に時間を表し, 縦軸にコイルや接点の動作状態を表したものを( タイムチャート )という。
答え (1)
2014年(平成26年)問13
シーケンス制御に関する記述として、誤っているものを次の(1)~(5)のうちから一つ選べ。
- 前もって定められた工程や手順の各段階を、スイッチ、リレー、タイマなどで構成する制御はシーケンス制御である。
- 荷物の上げ下げをする装置において、扉の開閉から希望階への移動を行う制御では、シーケンス制御が用いられる。
- 測定した電気炉内の温度と設定温度とを比較し、ヒータの発熱量を電力制御回路で調節して、電気炉内の温度を一定に保つ制御はシーケンス制御である。
- 水位の上限を検出するレベルスイッチと下限を検出するレベルスイッチを取り付けた水のタンクがある。水位の上限から下限に至る容積の水を次段のプラントに自動的に送り出す装置はシーケンス制御で実現できる。
- プログラマブルコントローラでは、スイッチ、リレー、タイマなどをソフトウェアで書くことで、変更が容易なシーケンス制御を実現できる。
2014年(平成26年)問13 過去問解説
(3) 電気炉内の温度を一定に保つ制御は、フィードバック制御が必要です。
答え (3)
2016年(平成28年)問13
次の文章は、フィードバック制御における三つの基本的な制御動作に関する記述である。
目標値と制御量の差である偏差に( ア )して操作量を変化させる制御動作を( ア )動作という。この動作の場合、制御動作が働いて目標値と制御量の偏差が小さくなると操作量も小さくなるため、制御量を目標値に完全に一致させることができず、( イ )が生じる欠点がある。
一方、偏差の( ウ )値に応じて操作量を変化させる制御動作を( ウ )動作という。この動作は偏差の起こり始めに大きな操作量を与える動作をするので、偏差を早く減衰させる効果があるが、制御のタイミング(位相)によっては偏差を増幅し不安定になることがある。
また、偏差の( エ )値に応じて操作量を変化させる制御動作を( エ )動作という。この動作は偏差が零になるまで制御動作が行われるので、( イ )を無くすことができる。
上記の記述中の空白箇所(ア)、(イ)、(ウ)及び(エ)に当てはまる組合せとして、正しいものを次の(1)~(5)のうちから一つ選べ。
| (ア) | (イ) | (ウ) | (エ) | |
| (1) | 積分 | 目標偏差 | 微分 | 比例 |
| (2) | 比例 | 定常偏差 | 微分 | 積分 |
| (3) | 微分 | 目標偏差 | 積分 | 比例 |
| (4) | 比例 | 定常偏差 | 積分 | 微分 |
| (5) | 微分 | 定常偏差 | 比例 | 積分 |
2016年(平成28年)問13 過去問解説
目標値と制御量の差である偏差に( 比例 )して操作量を変化させる制御動作を( 比例 )動作という。この動作の場合、制御動作が働いて目標値と制御量の偏差が小さくなると操作量も小さくなるため、制御量を目標値に完全に一致させることができず、( 定常偏差 )が生じる欠点がある。
一方、偏差の( 微分 )値に応じて操作量を変化させる制御動作を( 微分 )動作という。この動作は偏差の起こり始めに大きな操作量を与える動作をするので、偏差を早く減衰させる効果があるが、制御のタイミング(位相)によっては偏差を増幅し不安定になることがある。
また、偏差の( 積分 )値に応じて操作量を変化させる制御動作を( 積分 )動作という。この動作は偏差が零になるまで制御動作が行われるので、( 定常偏差 )を無くすことができる。
答え (2)