これだけは知っておきたい電気設備の基礎知識をご紹介します。このページでは「ポンプ用・送風機の運転と停止」について、維持管理や保全などを行う電気技術者の方が、知っておくとためになる電気の基礎知識を解説しています。
ポンプ用電動機の運転と停止
ポンプを定速度運転し、圧力や流量の調整を行わない場合は、ポンプ駆動用の電動機としては、電源容量が許せば、三相かご形誘導電動機によるじか入れ始動法が最も簡単で経済的といえます。なお、始動kVA容量が制限される場合は、補償器始動・リアクトル始動・スターデルタ始動のいずれかの方法が用いられています。
ポンプの圧力や流量の調整が必要な場合は、回転速度を一定のままとして、弁の開度を調整するか回転速度を調整するかの何れかによりますが、一般には回転速度を調整する方法がすぐれているので、普通この方法が用いられています。
この場合、速度制御の範囲は、ポンプの所要動力が回転速度の3乗に比例するので、制御範囲は50%程度までで十分であり、また制御性能についても、速応性や制御精度などについて、特に厳しい要求はないので、一般には誘導電動機が使用されますが、この場合の速度の制御方法で最も簡単な方法は、かご形誘導電動機を使った極数変換による段階的速度制御といえます。
送風機用電動機
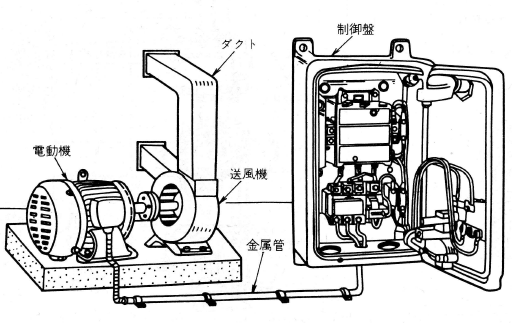
送風機を駆動する電動機は、低速・大容量のものを除いて、一般には安価で保守の容易な誘導電動機が用いられています。送風機で風量の調整を必要としない場合は、誘導電動機のうちでも最も構造的に丈夫で安価なかご形を使うのが有利であるといえます(第1図)。
なお、始動方法は電源容量が許せば、特に始動装置を必要としないじか入れ始動法が簡単です。しかし、電源容量の関係で始動電流を制限したい場合は、補償器始動・リアクトル始動などが用いられます。送風機の場合は、始動時間が数十秒にも及ぶことがあるので、これに耐えられるように充分な電流容量の始動装置とすることが必要です。
送風機は大きな慣性モーメントを有しているので、この値が電動機の許容慣性モーメントの限度以内であるかどうかを予じめ確かめておく必要があります。これは、電動機が送風機を駆動する場合、加速して始動が終えるまでに、負荷に与えられる運動のエネルギーと等しい電気的エネルギーが回転子内に熱として失われるので、この熱損失が電動機の許容限度をこえると、回転子導体の溶損事故の原因ともなります。電動機に対する負荷の慣性モーメントの限度は、標準電動機の特性表に記載されているので、これを見れば、標準形電動機で始動できる慣性モーメントかどうかを知ることができます。
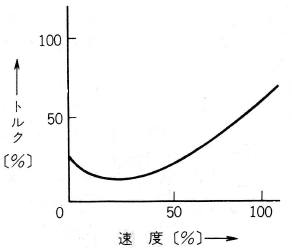
一般に、送風機の始動特性は第2図のような傾向を示します。静止時には、20~ 30%程度の始動トルクを必要としますが、始動しはじめると、静摩擦トルクが減少して、所要トルクは幾分減少し、速度が上昇するにしたがって、速度の2乗に比例してトルクは増加し、定格速度では40~ 60%になります。これは、無負荷で始動し、始動終了後負荷をかけた場合で、ときには吸入弁を全開して始動し、始動終了時に定格負荷がかかる場合もあるので、電動機の選定には負荷の始動条件を確認しておく必要があります。
揚水ボンプによる給水設備
ビルの衛生設備としての給水設備は、小ビルでは水道本管からビル内の所要箇所へ直接給水する方式がとられていますが、一般には高置(屋上,高架)タンク方式が用いられています。
高置タンク方式とは、水道本管より水を一度、受水槽へ貯水した後、ビル内の最高位の水せん、または器具に必要な圧力の得られる高さに設置した高架水槽へ揚水ポンプで揚水し、高架水槽から重力により、ビル内の必要箇所へ給水する方式をいいます(第3図)。
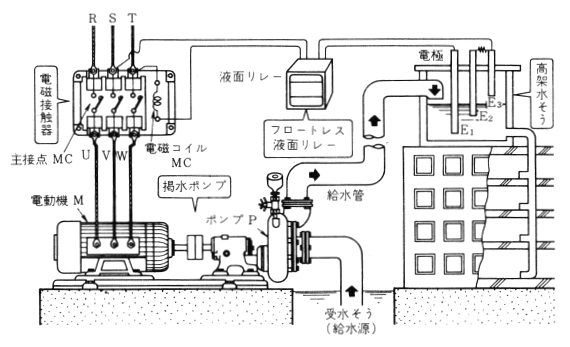
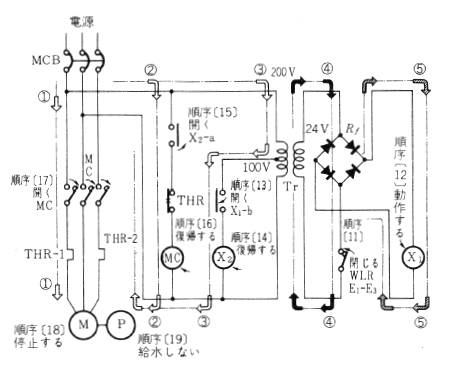
給水制御においては、各水槽に制御器としてフロートスイッチまたはフロートレス液面リレーの電極を取り付けて、水位の検出を行います。フロートレス液面リレーとは,、フロート(浮)を使わずに液体中に電流を流して、その変化で液面を制御するもので、電極間に流れる電流の変化を増幅して電極リレーを働かす形式になっています。
揚水ポンプの始動動作
水槽の水を使用することにより、水位がフロートレス液面リレーの電極E2より下がると、電極E2(E1)とE3との導通がなくなり、揚水ポンプは始動して水槽に給水します。揚水ポンプの運転は、水槽の水位が、電極E1に達するまで続きます(第4図)。
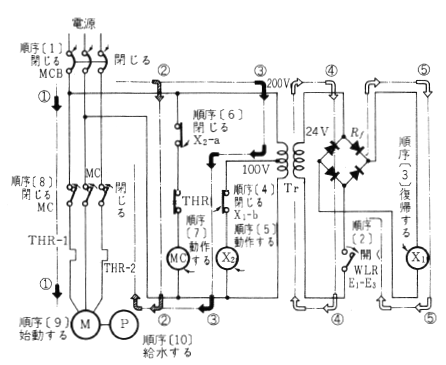
揚水ポンプの停止動作
揚水ポンプの運転により、給水されて、水槽の水位がフロートレス液面リレーの電極E1まで達すると、電極E1とE3とが導通となり、揚水ポンプは停止して給水を止めます。揚水ポンプの停止は、水槽水位が電極E2より下がるまで続きます(第5図)。