これだけは知っておきたい電気設備の基礎知識をご紹介します。このページでは「電動機の速度制御の方法と特徴」について、維持管理や保全などを行う電気技術者の方が、知っておくとためになる電気の基礎知識を解説しています。
交流可変速度電動機
最近のビルや工場の設備において、電動機に速度機能が要求される場合が多くなってきています。このような傾向に対して、従来は定速度運転に適していると考えられていた誘導電動機にも、速度制御機能をもたせるために、 インバータを使った方式が種々開発され、交流可変速度電動機として使われています。
電動機の同期速度
電動機(三相誘導電動機)は、電源の周波数と極数で決定される同期速度をわずかにすべって回転しています。電動機の固定子巻線にできる磁界は、いくつかの磁石を組み合わせなような状態になっており、その磁石に相当する極を、電動機の極数といいます。この磁石の回転により生ずる磁界を回転磁界といい、この回転磁界の回転する速度を同期速度 $N_O$ といいます。
同期速度 $N_O=\displaystyle\frac{120×f}{P}$〔回転/分〕
ただし、$P$:極数、$f$:周波数
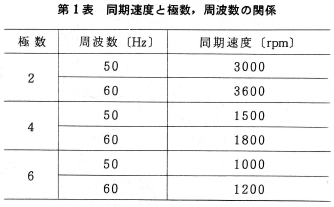
このように、同期速度 $N_O$ は、周波数 $f$ に比例し、極数 $P$ に反比例します。この式から、同期速度 $N_O$ は、電動機の極数 $P$ および、周波数 $f$ により、第1表のようになります。
電動機の回転速度を変えるには
電動機は、回転磁界によって回転子に電圧が誘起し、その誘起電圧による電流が流れ、この電流と回転磁界の磁束とでトルクを発生します。したがって、電動機がトルクを発生するために、回転磁界の移動速度、つまり同期速度よりも必ず少し遅い速度で回転するこが必要となります。これが、すべり $s$ というものです、
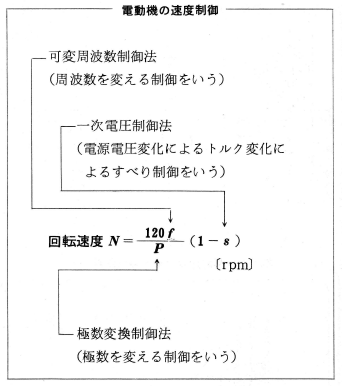
そこで、電動機の回転速度 $N$ は、
回転速度 $N=\displaystyle\frac{120×f}{P}(1-s)$〔回転/分〕
となります。したがって、電動機の速度を変えるには、極数 $P$ 、周波数 $f$ および、すべり $s$ のいずれかを変えればよいことになります。
巻線形誘導電動機においては、二次抵抗を変化すると、トルクの比例推移によりすべりが変化し、定格速度から40%程度までの速度制御ができるため、制御効率はよくないが、設備費が安価で取扱いが簡単なため従来から、広く採用されています。
電動機の速度制御に要求される条件は、
- 速度制御範囲が広いこと
- 連続的に安定な制御ができること
- 全速度制御領域にわたって効率がよいこと
- 取り扱いや保守が容易であること
などでありますが、すべてを満足する方式は得がたいです。用途の重要度に応じて選定する必要があります。
電動機の極数変換による速度制御
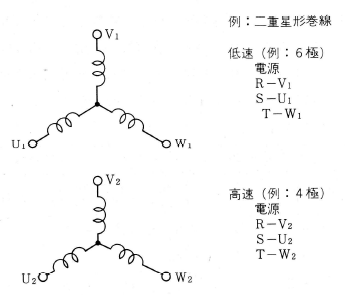
電動機の極数変換による速度制御には、2種類あります。その一つは、例えば、4極の巻線と6極の巻線を同一の固定子鉄心溝に巻き込む方式で、原理的には4極の電動機と6極の電動機を一つにしたものです(第1図)。
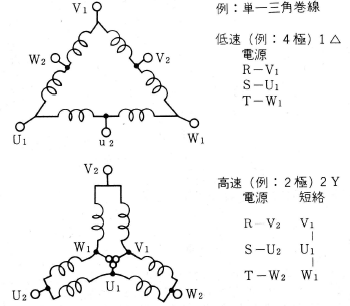
もう一つの方式は、同一鉄心、同一巻線を使用し、結線換えをすることにより、2種類の極数をつくることです。この場合、一般にその極数比は、2極と4極というように、2:1になります(第2図)。この制御方式は、連続的な速度の変化はできませんが、接続の変更で簡単に効率よく速度が変化できるので、段階的速度変化でもよい負荷の場合に用いられます。
電動機の可変周波数による速度制御
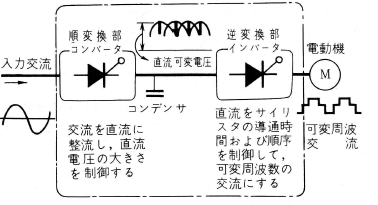
電動機の可変周波数による速度制御は、磁束の量一定、すなわち、電庄/周波数の比を一定に保って、周波数を変えることが必要ですから、周波数に対応して、電圧の大きさも制御しなければなりません。このような、電動機の可変周波数による速度制御のための、電源を可変電圧・可変周波数電源といいます。この可変電圧・可変周波数電源は、交流を一度直流に変換して、再び異なる周波数の交流に変換することより得られます(第3図)。
電動機の一次電圧制御による速度制御
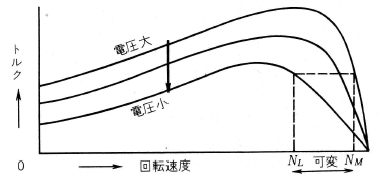
電動機の同一トルクを発生するすべりは、電圧の二乗に反比例して変わります。そこで、電動機のトルクー速度特性が、ハイスリップ特性をもつ場合、電圧を変えたときの電動機トルク特性と負荷トルクとの交点は、$N_L$ から $N_M$ で変わります。つまり、電圧を変えると速度が変わることになります。この場合、すべり $s$ を大きくして減速するので、減速時の損失が大きく効率が悪くなります(第4図)。
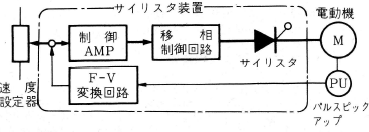
電動機の一次側にサイリスタ装置を接続して、電動機にかかる電圧を可変し、速度を制御する方式を、一次電圧制御法といいます(第5図)。