電験三種の機械で出題される電動機の総合問題が解けるように、回転機の公式など要点をまとめています。初心者の方でも解りやすいように、基礎から解説しています。また、電験三種の試験で、実際に出題された過去問も解説しています。
- その他の電動機
- 直流機の要点まとめ
- 同期機の要点まとめ
- 誘導機の要点まとめ
- 電験三種-機械(電気機器)過去問
- 2003年(平成15年)問6
- 2003年(平成15年)問6 過去問解説
- 2004年(平成16年)問7
- 2004年(平成16年)問7 過去問解説
- 2005年(平成17年)問10
- 2005年(平成17年)問10 過去問解説
- 2008年(平成20年)問6
- 2008年(平成20年)問6 過去問解説
- 2010年(平成22年)問6
- 2010年(平成22年)問6 過去問解説
- 2011年(平成23年)問6
- 2011年(平成23年)問6 過去問解説
- 2013年(平成25年)問7
- 2013年(平成25年)問7 過去問解説
- 2014年(平成26年)問9
- 2014年(平成26年)問9 過去問解説
- 2015年(平成27年)問6
- 2015年(平成27年)問6 過去問解説
- 2016年(平成28年)問6
- 2016年(平成28年)問6 過去問解説
- 2017年(平成29年)問6
- 2017年(平成29年)問6 過去問解説
その他の電動機
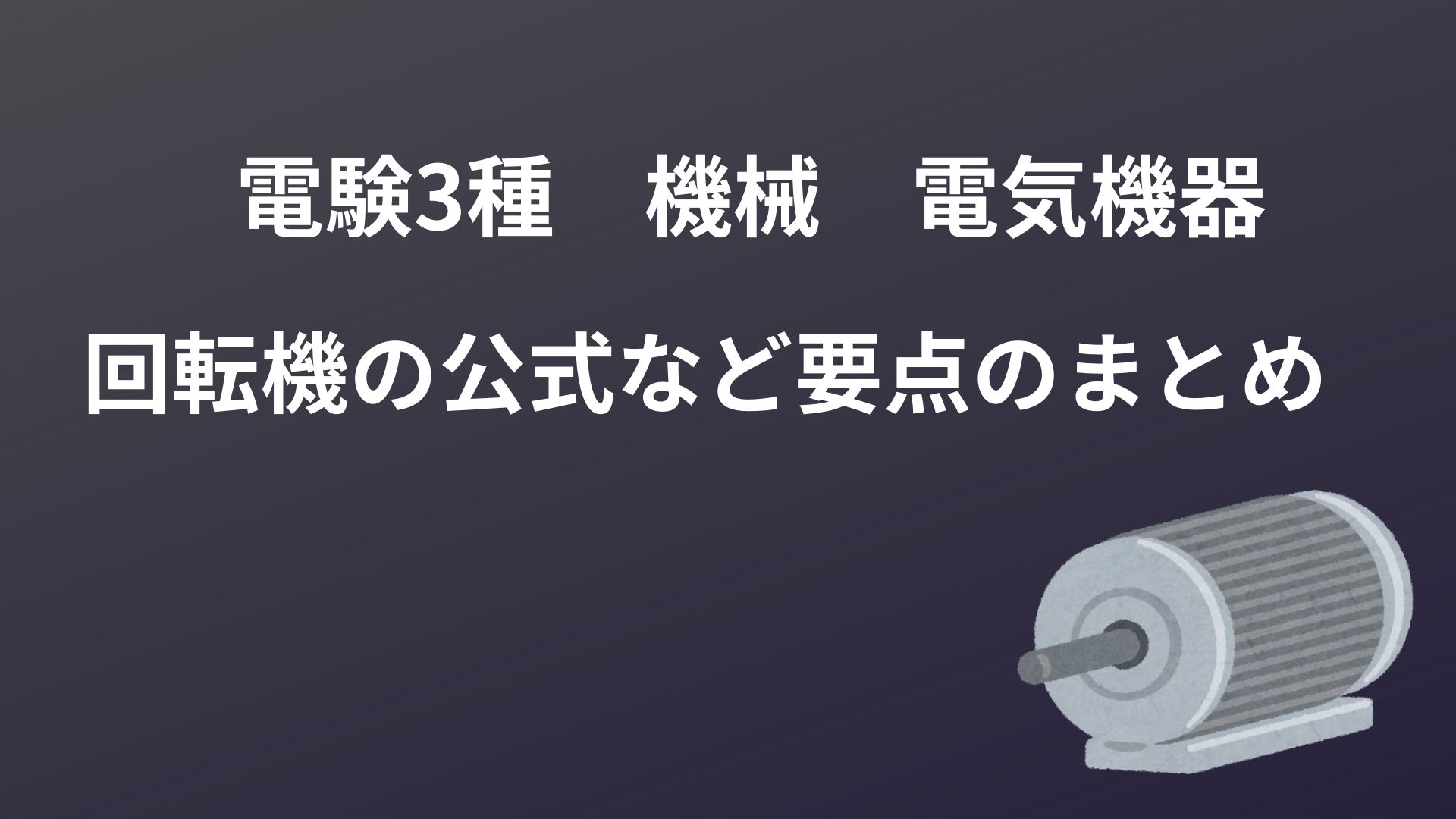
ブラシレスDCモーター
ブラシレスDCモーターは「インナーロータ形」と「アウターロータ形」があり、一般的にはインナーロータ形が使われています。
インナーロータ形は、固定された電機子巻線(固定子)の内側に配置された永久磁石が回転子として回転する方式で、アウターロータ形は、中央に固定された電機子巻線を配置し、その外側に置かれた永久磁石が回転する方式です。
ブラシレスDCモーターは、直流電源と電機子巻線の間に、トランジスタなどの半導体スイッチを接続し、これを切り替えて電機子巻線に流れる電流の向きを交互に切り替えることにより、回転子を回転させることができます。また、回転位置を検出するためのセンサとして「ホール素子」が使われています。
ブラシレスDCモーターの特徴
- 効率が良い。
- 機械的接触を行うブラシと整流子がないため、ノイズ(電気雑音)が少ない。
- ブラシ付きと比べて寿命が長い。
- 駆動用の制御回路が必要となり、周辺回路が複雑になる。
- ハードディスクドライブのような精密機器から、エアコンや冷蔵庫のような大型の家電製品にも利用されるなど、汎用性が高い。
ステッピングモーター
ステッピングモーターはパルスモーターとも呼ばれ、パルス信号を入力すると一定の角度ずつ回転するモーターです。1 つのパルス信号で回転する角度を「ステップ角」といい、回転速度はパルス信号の速度(パルス周波数)に比例します。
ステッピングモーターは、パルス信号の入力数に応じて回転角度を決められるので、位置決め制御を行うことができ、ステップ角が小さいほど正確な位置決めを行うことができます。
ステッピングモーターには永久磁石形、可変リラクタンス形、ハイブリッド形等があり、永久磁石形は、回転子に永久磁石を使用しています。また、可変リラクタンス形は、回転子に歯車状の鉄心を使用しています。ハイブリッド形は、永久磁石形と可変リラクタンス形の特徴を併せ持つ構造です。
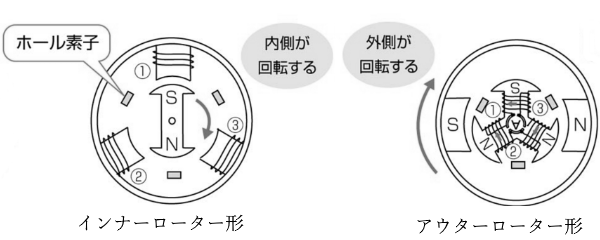
交流整流子モーター
交流整流子モーターは、交流・直流どちらでも使用できる交直両用モーターで、「ユニバーサルモーター」とも呼ばれています。
交流整流子モーターは、直流直巻モーターに近い構造で、電機子巻線と界磁巻線が直列に接続された構造になっています。
交流整流子モーターに交流電源を接続すると、界磁巻線と電機子巻線に流れる電流は周期的に向きが変わります。電源の電流の向きが変わると、界磁巻線に流れる電流と電機子巻線に流れる電流の向きも一緒に変わるので、回転子の回転方向は、常に一定になります。直流電源を接続する場合、(+)と(-)をどちらの向きで接続しても回転方向は同じになります。
交流整流子モーターの特徴
- 始動トルクが大きい
- 誘導モーターより回転速度が高速
- ノイズが出る
- ブラシを使用するため常時運転には向かない
直流機の要点まとめ
- 直流発電機は界磁磁束中で電気子巻線を回転させ、電機子巻線に発生した交流起電力を整流子とブラシによって整流して、直流起電力を得る装置である。
- 直流発電機は、電機子鉄心・電機子巻線・整流子・ブラシ・界磁鉄心・界磁巻線・継鉄などによって構成されている。
- 直流発電機の起電力
$E=\displaystyle\frac{pZ}{60a}ϕN=K_1ϕN$
$K_1$ は電圧定数
- 電機子電流による起磁力が界磁起磁力に与える影響を電機子反作用といい、この影響を防ぐために補償巻線や捕極が用いられる。
- 直流発電機には他励式と自励式がある。自励式には、分巻発電機・直巻発電機・複巻発電機がある。
- 直流発電機の特性は、無負荷飽和曲線と外部特性曲線で調べる。
- 直流発電機に電圧を加え、電機子電流を流すと電機子は回転し直流電動機として働く。
- 直流電動機のトルク
$T=\displaystyle\frac{pZ}{2πa}×ϕI_a=K_2ϕI_a$
$K_2$ はトルク定数
- 直流電動機の出力
$P_o=2π\displaystyle\frac{n}{60}T=ωT$
- 直流電動機に生じる電機子反作用の影響は、発電機の場合とは反対であるが、補償巻線や捕極の極性は発電機の場合と同じでよい。
- 直流電動機の特性は、速度特性やトルク特性などで表される。
- 直流電動機の回転速度
$n=\displaystyle\frac{V-R_aI_a}{K_1ϕ}$
- 直流電動機を始動するには、始動抵抗器を電機子と直列に入れ、始動電流が過大となることを防ぐ。
- 直流電動機の速度制御法には、界磁制御法・抵抗制御法・電圧制御法などがある。
- 直流機の効率
$η=\displaystyle\frac{P_o}{P_i}×100=\displaystyle\frac{P_o}{P_o+P_l}×100$
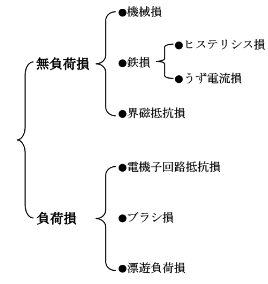
- 直流機の損失には、銅損・鉄損・機械損などがある。
- 直流発電機の電圧変動率
$ε=\displaystyle\frac{V_o-V_n}{V_n}×100$
- 直流電動機の速度変動率
$δ=\displaystyle\frac{n_o-n_n}{n_n}×100$
同期機の要点まとめ
- 回転界磁形同期発電機は、磁極を回転させる形になっており、スリップリングが2個でよい。電機子巻線が静止しているので絶縁が容易で、しかも大きな電流を取り出せるので大容量機に適する。
- 電機子反作用
- 起電力と同相
同期発電機:交さ磁化作用、同期電動機:交さ磁化作用 - 起電力より遅れ
同期発電機:減磁作用、同期電動機:増磁作用 - 起電力より進み
同期発電機:増磁作用、同期電動機:減磁作用
- 起電力と同相
- 同期インピーダンス
$Z_s=\sqrt{{r_a}^2+{x_s}^2}=\displaystyle\frac{V_{n}}{\sqrt{3}{I_s}}$
- 百分率同期インピーダンス
$ \%Z_s=\displaystyle\frac{Z_sI_n}{\displaystyle\frac{V_n}{\sqrt{3}}}×100=\displaystyle\frac{I_n}{I_s}×100$
- 三相同期発電機の短絡比
$S=\displaystyle\frac{I_{fs}}{I_{fn}}=\displaystyle\frac{I_s}{I_n}=\displaystyle\frac{100}{\%Z_s}$
- 三相同期発電機の出力(1相分)
$P_s=VIcosθ=\displaystyle\frac{VE}{x_s}sinδ$
出力 $P_s$ は端子電圧 $V$ に対する誘導起電力 $E$ の位相角 $δ$ の正弦関数で表され、この $δ$ を負荷角という。
- 三相同期発電機の並列運転(接続)の条件
- 起電力の周波数が等しい。
- 起電力の大きさが等しい。
- 起電力の位相が一致している。
- 起電力の波形が等しい。
- 三相同期発電機の電圧と電流(1相分)
$\dot{E}=\dot{V}+(r_a+jx_s)\dot{I_G}$
- 三相同期電動機の電圧と電流(1相分)
$\dot{E}=\dot{V}-(r_a+jx_s)\dot{I_M}$
- 三相同期電動機の出力(1相分)
$P_o=\displaystyle\frac{VE}{x_s}sinδ$
- トルク
$T=\displaystyle\frac{60}{2πn_s}・3P_o=\displaystyle\frac{60}{2πn_s}・\displaystyle\frac{3VE}{x_s}sinδ$
- 三相同期電動機の電機子電流と界磁電流との関係はV曲線となる。V曲線の最低点が力率1で、それより界磁電流の大きいほうは進み力率、反対に小さいほうは遅れ力率の範囲である。
- 三相同期電動機の始動法には、自己始動法と始動電動機法とがある。
- 三相同期電動機の位相特性曲線(V曲線)を利用して、負荷の力率改善をはかる目的で使用する同期調相機がある。
誘導機の要点まとめ
- 三相誘導電動機の回転磁界の回転速度 $n_s$[min$^{-1}$]
$n_s=\displaystyle\frac{120f}{p}$[min$^{-1}$]
$n_s$[min$^{-1}$]を同期速度という。
- 三相誘導電動機には、回転子の構造により、かご形と巻線形とがある。
- 三相誘導電動機の滑り $s$
$s=\displaystyle\frac{n_s-n}{n_s}$
- 滑り s で運転中の三相誘導電動機の二次電流 $I_2$[A]
$I_2=\displaystyle\frac{sE_2}{\sqrt{{r_2}^2+(sx_2)^2}}$
- 三相誘導電動機の等価回路は、変圧器の等価回路と同じ形で表されるが、滑り $s$ で運転中の二次回路の誘導起電力は $sE_2$、滑り周波数は $sf$、リアクタンスは $sx_2$ となる。
- 三相誘導電動機の出力 $P_o$[W]
$P_o={I_2}^2r_2\left(\displaystyle\frac{1-s}{s}\right)={I_2}^2R$
$R$[Ω]は負荷を表す等価抵抗
- 三相誘導電動機のトルク $T$[N・m]と出力 $P_o$[W]の関係
$T=\displaystyle\frac{60}{2π}・\displaystyle\frac{P_o}{n}$
- 二次入力(同期ワット) $P_2$[W]
$P_2=2π\displaystyle\frac{n_s}{60}T$
- トルクが一定の場合、二次回路の抵抗と滑りの比
$\displaystyle\frac{{r_2}’}{s_1}=\displaystyle\frac{{r_2}’+R_s}{s_2}$
トルクは $R$ の大きさによって比例推移する。
- 三相誘導電動機の始動法には、全電圧始動法・Y―△始動法・始動補償器法などがある。
- 三相誘導電動機の速度制御法には、かご形は周波数・一次電圧・極数変換による制御があり、巻線形は二次抵抗・一次電圧による制御がある。

電験三種-機械(電気機器)過去問
2003年(平成15年)問6
運転中の回転電気機械に発生する損失のうち、一般的な鉄損に関する記述は次のうちどれか。
- 回転子鉄心と周囲空気との間の摩擦による損失である。
- 巻線中に発生する損失である。
- 漏れ磁束によって発生する損失である。
- エヤギャップの磁気抵抗によって発生する損失である。
- 鉄心中の磁束の時間的変化によって発生する損失である。
2003年(平成15年)問6 過去問解説
鉄損には、ヒステリシス損と渦電流損があります。設問はそれぞれ次の損失を説明しています。
(1) 風損 (2) 銅損 (3) 漂遊負荷損 (4) 銅損 (5) ヒステリシス損
したがって、(5)が正しい記述です。
答え (5)
2004年(平成16年)問7
次の(ア)から(エ)の記述は、「各電気機器の性質を述べよ」という問題に対する解答例を示したものである。
- トルク一定の負荷を負って回転している巻線形誘導電動機の二次抵抗を大きくすると、滑りは増加する。
- トルク一定の負荷を負って回転している同期電動機の界磁電流を大きくすると、無効電流は進み側に増大する。
- トルク一定の負荷を負って回転している直流電動機の界磁電流を大きくすると、回転速度は上昇する。
- ある変圧器の電源周波数を高くすると励磁電流は増加する。
これらの四つの解答例について、正・誤の判定が間違っていないもの(正しく記載したもの)を組み合わせたのは次のうちどれか。
| (ア) | (イ) | (ウ) | (エ) | |
| (1) | 正 | 誤 | 正 | 正 |
| (2) | 正 | 正 | 誤 | 誤 |
| (3) | 誤 | 正 | 正 | 正 |
| (4) | 正 | 正 | 正 | 誤 |
| (5) | 正 | 誤 | 誤 | 正 |
2004年(平成16年)問7 過去問解説
- 正しい記述です。
- 正しい記述です。
- トルク一定の場合回転数は、界磁電流に反比例しますので、 回転速度は減少します。したがって誤った記述です。
- 変圧器の入力周波数が高くなると、小さな磁束で励磁電流が発生しますので、励磁電流は小さくなる。したがって誤った記述です。
答え (2)
2005年(平成17年)問10
可変速交流ドライブシステムで最もよく使われている電動機は( ア )である。電源の電圧 V と周波数 f が一定ならばトルクは( イ )の関数となる。( イ )が零のときトルクは零で、( イ )が増加するにつれてトルクはほぼ直線的に増加し、やがて最大トルクに達する。最大トルクを超えると( イ )が増加するにつれてトルクは減少する。同期速度を越えて回転子の速度が上昇すると( ア )は( ウ )として動作する。
電源の周波数を変化させるときでも、トルクー速度曲線はある一定の直線に沿って平行移動するような特性を得たい、すなわち周波数を高くしたときでも最大トルクの変化を小さくするためには、( エ )が一定になるように制御すればよい。
上記の記述中の空白箇所(ア),(イ),(ウ)及び(エ)に記入する語句又は式として、正しいものを組み合わせたのは次のうちどれか。
| (ア) | (イ) | (ウ) | (エ) | |
| (1) | 同期電動機 | 滑 り | 同期発電機 | $V・f$ |
| (2) | 永久磁石式同期電動機 | 電機子電流 | 誘導発電機 | $V$ |
| (3) | 誘導電動機 | 滑 り | 同期発電機 | $V・f$ |
| (4) | 永久磁石式同期電動機 | 電機子電流 | 誘導発電機 | $\displaystyle\frac{V}{f}$ |
| (5) | 誘導電動機 | 滑 り | 誘導発電機 | $\displaystyle\frac{V}{f}$ |
2005年(平成17年)問10 過去問解説
可変速交流ドライブシステムで最もよく使われている電動機は( 誘導電動機 )である。電源の電圧 V と周波数 f が一定ならばトルクは( 滑り )の関数となる。( 滑り )が零のときトルクは零で、( 滑り )が増加するにつれてトルクはほぼ直線的に増加し、やがて最大トルクに達する。最大トルクを超えると( 滑り )が増加するにつれてトルクは減少する。同期速度を越えて回転子の速度が上昇すると( 誘導電動機 )は( 誘導発電機 )として動作する。
電源の周波数を変化させるときでも、トルクー速度曲線はある一定の直線に沿って平行移動するような特性を得たい、すなわち周波数を高くしたときでも最大トルクの変化を小さくするためには、( $\displaystyle\frac{V}{f}$ )が一定になるように制御すればよい。
可変速交流ドライブシステムは、誘導電動機などの交流回転機を駆動し、交流入力電力を制御することによって、速度制御を行うシステムです。もっとも使用されているのは、誘導電動機で、V/fを一定に保つことにより、トルクはすべりSの関数となります。したがって、すべり周波数を制御することにより、トルク制御することができます。
答え (5)
2008年(平成20年)問6
主な電動機として、同期電動機、誘導電動機及び直流電動機がある。堅固で構造も簡単な電動機は( ア )誘導電動機である。この電動機は、最近は、トルク制御と励磁制御を分離して制御可能な( イ )制御によって、直流電動機とそん色ない速度制御が可能になった。
回転速度が広範囲で精密な制御が簡単にできるのは直流電動機である。この電動機は、従来ブラシと( ウ )により回転子に電力を供給していた。最近よく使用されているブラシレス直流電動機(プラシレスDCモータ)は、回転子に( エ )を組み入れて、効率の向上、保守の簡易化が図られたものである。
また、同期電動機は,供給電源の周波数に同期した速度が要求されるものに使用される。
上記の記途中の空白箇所(ア),(イ),(ウ)及び(エ)に当てはまる語句として、正しいものを組み合わせたのは次のうちどれか。
| (ア) | (イ) | (ウ) | (エ) | |
| (1) | かご形 | ベクトル | 整流子 | 永久磁石 |
| (2) | 巻線形 | スカラ | スリップリング | 銅バー |
| (3) | かご形 | スカラ | スリップリング | 永久磁石 |
| (4) | かご形 | スカラ | 整流子 | 銅バー |
| (5) | 巻線形 | ベクトル | 整流子 | 永久磁石 |
2008年(平成20年)問6 過去問解説
主な電動機として、同期電動機、誘導電動機及び直流電動機がある。堅固で構造も簡単な電動機は( かご形 )誘導電動機である。この電動機は、最近は、トルク制御と励磁制御を分離して制御可能な( ベクトル )制御によって、直流電動機とそん色ない速度制御が可能になった。
回転速度が広範囲で精密な制御が簡単にできるのは直流電動機である。この電動機は、従来ブラシと( 整流子 )により回転子に電力を供給していた。最近よく使用されているブラシレス直流電動機(プラシレスDCモータ)は、回転子に( 永久磁石 )を組み入れて、効率の向上、保守の簡易化が図られたものである。
また、同期電動機は,供給電源の周波数に同期した速度が要求されるものに使用される。
ベクトル制御
交流電動機を流れる電流を、トルクを発生する電流成分と磁束を発生する電流成分とに分解し、それぞれの電流成分をおのおの制御する方式です。電動機の回転磁界の磁束の方向と大きさをベクトル量として制御でき、直流電動機のような速度制御が可能になります。
ブラシレス直流電動機(ブラシレス DC モータ)は、回転子に永久磁石を組み入れて、効率の向上や保守の簡易化が図られたものです。
答え (1)
2010年(平成22年)問6
電気機器は磁束を利用する観点から,次のように分類して考えることができる。
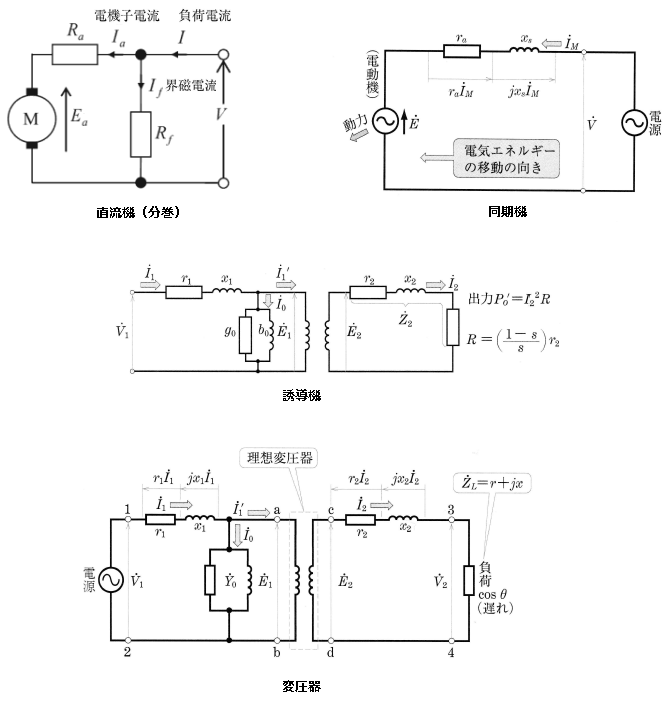
- 交流で励磁する( ア )と( イ )は、負荷電流を流す巻線が磁束を発生する巻線を兼用するなどの共通点があるので、基本的に同じ形の等価回路を用いて特性計算を行う。
- 直流で励磁する( ウ )と( エ )は、負荷電流を流す電機子巻線と、磁束を発生する界磁巻線を分けて設ける。
- ( エ )を自己始動電動機として用いる場合、その磁極表面にかご形導体を設け、( イ )と同様の始動トルクを発生させる。
上記の記述中の空白箇所(ア),(イ),(ウ)及び(エ)に当てはまる語句として、正しいものを組み合わせたのは次のうちどれか。
| (ア) | (イ) | (ウ) | (エ) | |
| (1) | 誘導機 | 変圧器 | 直流機 | 同期機 |
| (2) | 変圧器 | 誘導機 | 同期機 | 直流機 |
| (3) | 誘導機 | 変圧器 | 同期機 | 直流機 |
| (4) | 変圧器 | 誘導機 | 直流機 | 同期機 |
| (5) | 変圧器 | 同期機 | 直流機 | 誘導機 |
2010年(平成22年)問6 過去問解説
- 交流で励磁する( 変圧器 )と( 誘導機 )は、負荷電流を流す巻線が磁束を発生する巻線を兼用するなどの共通点があるので、基本的に同じ形の等価回路を用いて特性計算を行う。
- 直流で励磁する( 直流機 )と( 同期機 )は、負荷電流を流す電機子巻線と、磁束を発生する界磁巻線を分けて設ける。
- ( 同期機 )を自己始動電動機として用いる場合、その磁極表面にかご形導体を設け、( 誘導機 )と同様の始動トルクを発生させる。
答え (4)
2011年(平成23年)問6
次の文章は、交流電気機器の損失に関する記述である。
- 磁束が作用して鉄心の電気抵抗に発生する( ア )は、鉄心に電流が 流れにくいように薄い鉄板を積層して低減する。
- コイルの電気抵抗に電流が作用して発生する( イ )は、コイルに電流が流れやすいように導体の断面積を大きくして低減する。
- 磁性材料を通る磁束が変動すると発生する( ウ )、及び変圧器には存在しない( エ )は、機器に負荷をかけなくても存在するので無負荷損と称する。
- 最大磁束密度一定の条件で( オ )は周波数に比例する。
上記の記述中の空白箇所(ア),(イ),(ウ),(エ)及び(オ)に当てはまる組合せとして, 正しいものを次の(1)~(5)のうちから一つ選べ。
| (ア) | (イ) | (ウ) | (エ) | (オ) | |
| (1) | 渦電流損 | 銅損 | 鉄損 | 機械損 | ヒステリシス損 |
| (2) | ヒステリシス損 | 渦電流損 | 鉄損 | 機械損 | 励磁損 |
| (3) | 渦電流損 | 銅損 | 機械損 | 鉄損 | ヒステリシス損 |
| (4) | ヒステリシス損 | 渦電流損 | 機械損 | 鉄損 | 励磁損 |
| (5) | 渦電流損 | 銅 損 | 機械損 | 鉄損 | 励磁損 |
2011年(平成23年)問6 過去問解説
- 磁束が作用して鉄心の電気抵抗に発生する( 渦電流損 )は、鉄心に電流が 流れにくいように薄い鉄板を積層して低減する。
- コイルの電気抵抗に電流が作用して発生する( 銅損 )は、コイルに電流が流れやすいように導体の断面積を大きくして低減する。
- 磁性材料を通る磁束が変動すると発生する( 鉄損 )、及び変圧器には存在しない( 機械損 )は、機器に負荷をかけなくても存在するので無負荷損と称する。
- 最大磁束密度一定の条件で( ヒステリシス損 )は周波数に比例する。
- 負荷電流が流れると漏れ磁束が生じ、そのために導体内部にうず電流損が発生します。鉄心には絶縁した薄い鋼板を積層して対策しています。
- コイルの電気抵抗に電流が流れて発生する銅損は,コイルの導体の断面積を大きくして低減する。
- 磁性材料を通る磁束の変動で発生する鉄損、および変圧器には存在しない機械損は、機器に負荷をかけなくても存在するので無負荷損いいます。
- ヒステリシス損は、$P_h={k_hfB_m}^2$ で示され,最大磁束密度が $B_m$ が一定なら、周波数 $f$ に比例します。$k_h$ は比例定数です。
答え (1)
2013年(平成25年)問7
次の a から d の電動機を用いた駆動システムがある。
- 電機子用、界磁用の二つの直流電源で駆動される他励直流電動機
- 電機子及び界磁共用の一つの直流電源で駆動される直流直巻電動機
- 定格の電圧と定格の周波数との比を保って、電圧と周波数とを制御する交流電源で駆動され、一次抵抗及び漏れインダクタンスを無視できる三相誘導電動機
- 定格の 0.9 倍の電圧と定格の周波数との比を保って、電圧と周波数とを制御する交流電源で駆動され、一次抵抗及び漏れインダクタンスを無視できる三相誘導電動機
これらの駆動システムにおいて、ある速度で運転している電動機の負荷トルクが増加した場合に以下の運転をするとき、トルクの発生に寄与する電動機内の磁束の変動について考える。
a,b のシステムでは、直流電源で電機子電流を増加して、電動機の速度を一定に保つ。
c,d のシステムでは、交流電源の電圧と周波数を維持すると、滑りと一次電流は増加するが、滑りが小さいとすれば電動機の速度はほぼ一定に保たれる。
この運転において、a、b のシステムでは電機子電流に対して、また、c,d のシステムでは一次電流に対して、電動機内の磁束がほぼ比例して変化するのはどの駆動システムであるか。正しいものを次の(1)~(5)のうちから一つ選べ。
(1) a (2) b (3) c と d (4) d (5) b と d
2013年(平成25年)問7 過去問解説
a.他励直流電動機は界磁電流を外部電源からもらいますので、電機子電流と磁束は比例しません。
b.直流直巻電動機は、電機子と界磁とが直列に接続されています。そのため、電機子電流と界磁電流は同じ値になります。したがって、電機子電流と磁束は比例します。
cとdは、 交流電源の電圧と周波数を維持していますので、磁束は変化しません。一次電流の変化させても、磁束は比例しません。
答え (2)
2014年(平成26年)問9
次の文章は、電動機の速度制御に関する記述である。
他励直流電動機の速度制御には、界磁回路の直流電流を調整する方法のほかに、電機子回路の( ア )を調整する方法がある。これは、磁束一定の条件で、誘導起電力が( イ )に比例している特性を利用したものである。この方法によると、速度が一定となる定常状態において、負荷トルクの変動によって電機子抵抗による電圧降下分だけの速度変動を生じる。
誘導電動機の速度制御には、電源が商用電源である場合は滑りを広く利用する方法がある。その方法は( ウ )や、巻線形誘導電動機の二次抵抗による比例推移を利用する制御である。しかし、滑りを利用する方法は、速度が定格速度に比べて低くなるほど二次効率が( エ )する。これを改善する巻線形誘導電動機の二次励磁という制御は、二次回路に電力変換器を接続して二次抵抗損に相当する電力を交流電源( オ )する方法である。
上記の記述中の空白箇所(ア),(イ),(ウ),(エ)及び(オ)に当てはまる組合せとして、正しいものを次の(1)~(5)のうちから一つ選べ。
| (ア) | (イ) | (ウ) | (エ) | (オ) | |
| (1) | 直流電圧 | 速度 | 一次電圧制御 | 低下 | に返還 |
| (2) | 直流電流 | 速度 | 極数変換 | 増加 | から供給 |
| (3) | 直流電圧 | 電機子電流 | 極数変換 | 低下 | に返還 |
| (4) | 直流電圧 | 電機子電流 | 一次電圧制御 | 増加 | に返還 |
| (5) | 直流電流 | 電機子電流 | 一次電圧制御 | 低下 | から供給 |
2014年(平成26年)問9 過去問解説
他励直流電動機の速度制御には、界磁回路の直流電流を調整する方法のほかに、電機子回路の( 直流電圧 )を調整する方法がある。これは、磁束一定の条件で、誘導起電力が( 速度 )に比例している特性を利用したものである。この方法によると、速度が一定となる定常状態において、負荷トルクの変動によって電機子抵抗による電圧降下分だけの速度変動を生じる。
誘導電動機の速度制御には、電源が商用電源である場合は滑りを広く利用する方法がある。その方法は( 一次電圧制御 )や、巻線形誘導電動機の二次抵抗による比例推移を利用する制御である。しかし、滑りを利用する方法は、速度が定格速度に比べて低くなるほど二次効率が( 低下 )する。これを改善する巻線形誘導電動機の二次励磁という制御は、二次回路に電力変換器を接続して二次抵抗損に相当する電力を交流電源( に返還 )する方法である。
誘導電動機の速度制御法には、(a)一次電圧を変える、(b)周波数を変える、(c)極数を変える、(d)二次抵抗を変える、(e)二次励磁を加減する、などがあります。これらのうち、極数を変える方法は主にかご形電動機に用いられ、巻線形電動機に用いられる二次励磁法にはクレーマ方式とセルビウス方式があります。
二次励磁法は、二次側(回転子)巻線の電力を回生することによって速度を制御しています。損失が少ないことが特徴です。
答え (1)
2015年(平成27年)問6
小形直流モータを分解すると、N極とS極用の2個の永久磁石、回転子の溝に収められた3個のコイル、3個の( ア )で構成されていた。
一般に( イ )の溝数を減らすと、エアギャップ磁束が脈動し、トルクの脈動が増える。そこで、希土類系永久磁石には大きな( ウ )があるので、溝をなくしてエアギャップにコイルを設け、トルク脈動の低減を目指した小形モータも作られている。
小形( エ )には、永久磁石を回転子の表面に設けたSPMSMという機種、永久磁石を回転子に埋め込んだIPMSMという機種、突極性を大きくした鉄心だけのSynRMという機種などがある。小形直流モータは電池だけで運転されるものが多いが、小形( エ )は、円滑な( オ )が困難なため、インバータによって運転される。
上記の記述中の空白箇所(ア),(イ),(ウ),(エ)及び(オ)に当てはまる組合せとして、正しいものを次の(1)~(5)のうちから一つ選べ。
| (ア) | (イ) | (ウ) | (エ) | (オ) | |
| (1) | 整流子片 | 電機子 | 保磁力 | 同期モータ | 始動 |
| (2) | 整流子片 | 界磁 | 透磁率 | 誘導モータ | 制動 |
| (3) | ブラシ | 電機子 | 透磁率 | 同期モータ | 制動 |
| (4) | 整流子片 | 電機子 | 保磁力 | 誘導モータ | 始動 |
| (5) | ブラシ | 界磁 | 透磁率 | 同期モータ | 始動 |
2015年(平成27年)問6 過去問解説
小形直流モータを分解すると、N極とS極用の2個の永久磁石、回転子の溝に収められた3個のコイル、3個の( 整流子片 )で構成されていた。
一般に( 電機子 )の溝数を減らすと、エアギャップ磁束が脈動し、トルクの脈動が増える。そこで、希土類系永久磁石には大きな( 保磁力 )があるので、溝をなくしてエアギャップにコイルを設け、トルク脈動の低減を目指した小形モータも作られている。
小形( 同期モータ )には、永久磁石を回転子の表面に設けたSPMSMという機種、永久磁石を回転子に埋め込んだIPMSMという機種、突極性を大きくした鉄心だけのSynRMという機種などがある。小形直流モータは電池だけで運転されるものが多いが、小形( 同期モータ )は、円滑な( 始動 )が困難なため、インバータによって運転される。
答え (1)
2016年(平成28年)問6
次の文章は、電源電圧一定(交流機の場合は多相交流巻線に印加する電源電圧の周波数も一定。)の条件下における各種電動機において、空回しの無負荷から、負荷の増大とともにトルクを発生する現象に関する記述である。
無負荷条件の直流分巻電動機では、回転速度に比例する( ア )と( イ )とがほぼ等しく、電機子電流がほぼ零となる。この状態から負荷が掛かって回転速度が低下すると、電機子電流が増大してトルクが発生する。
無負荷条件の誘導電動機では、周波数及び極数で決まる( ウ )と回転速度とがほぼ等しく、( エ )がほぼ零となる。この状態から負荷が掛かって回転速度が低下すると、( エ )が増大してトルクが発生する。
無負荷条件の同期電動機では、界磁単独の磁束と電機子反作用を考慮した電機子磁束との位相差がほぼ零となる。この状態から負荷が掛かっても回転速度の低下はないが、上記両磁束の位相差、すなわち( オ )が増大してトルクが発生する。
上記の記述中の空白箇所(ア),(イ),(ウ),(エ)及び(オ)に当てはまる組合せとして、正しいものを次の(1)~(5)のうちから一つ選べ。
| (ア) | (イ) | (ウ) | (エ) | (オ) | |
| (1) | 逆起電力 | 電源電圧 | 同期速度 | 滑り | 負荷角 |
| (2) | 誘導起電力 | 逆起電力 | 回転磁界 | 二次抵抗 | 負荷角 |
| (3) | 逆起電力 | 電源電圧 | 定格速度 | 二次抵抗 | 力率角 |
| (4) | 誘導起電力 | 逆起電力 | 同期速度 | 滑り | 負荷角 |
| (5) | 逆起電力 | 電源電圧 | 回転磁界 | 滑り | 力率角 |
2016年(平成28年)問6 過去問解説
無負荷条件の直流分巻電動機では、回転速度に比例する( 逆起電力 )と( 電源電圧 )とがほぼ等しく、電機子電流がほぼ零となる。この状態から負荷が掛かって回転速度が低下すると、電機子電流が増大してトルクが発生する。
$E=V-I_aR_a=V$
($E$:逆起電力、$V$:電源電圧、$I_a$:電機子電流、$R_a$:電機子抵抗)
$E=\displaystyle\frac{pZ}{60a}ϕN=K_1ϕN$
($p$:磁極数、$Z$:電機子導体数、$ϕ$:磁極の磁束、$N$:回転数、$a$電機子の並列回路数、$K_1=\displaystyle\frac{pZ}{60a}$:電圧定数)
$T=\displaystyle\frac{pZ}{2πa}×ϕI_a=K_2ϕI_a$
($T$:トルク、$K_2$ :トルク定数)
無負荷条件の誘導電動機では、周波数及び極数で決まる( 同期速度 )と回転速度とがほぼ等しく、( 滑り )がほぼ零となる。この状態から負荷が掛かって回転速度が低下すると、( 滑り )が増大してトルクが発生する。
$n_s=\displaystyle\frac{2f}{p}×60=\displaystyle\frac{120f}{p}$
($p$:極数 、$f$:周波数、$n_s$:同期速度)
$s=\displaystyle\frac{同期速度-回転速度}{同期速度}=\displaystyle\frac{n_s-n}{n_s}$
($s$:滑り、$π$:回転速度)
$T=K_2V^2s$
無負荷条件の同期電動機では、界磁単独の磁束と電機子反作用を考慮した電機子磁束との位相差がほぼ零となる。この状態から負荷が掛かっても回転速度の低下はないが、上記両磁束の位相差、すなわち( 負荷角 )が増大してトルクが発生する。
$T=\displaystyle\frac{60}{2πn_s}・3P_o=\displaystyle\frac{60}{2πn_s}・\displaystyle\frac{3VE}{x_s}sinδ$
($V$:供給電圧、$E$:電動機の逆起電力、$x_s$:同期リアクタンス、$δ$:負荷角)
答え (1)
2017年(平成29年)問6
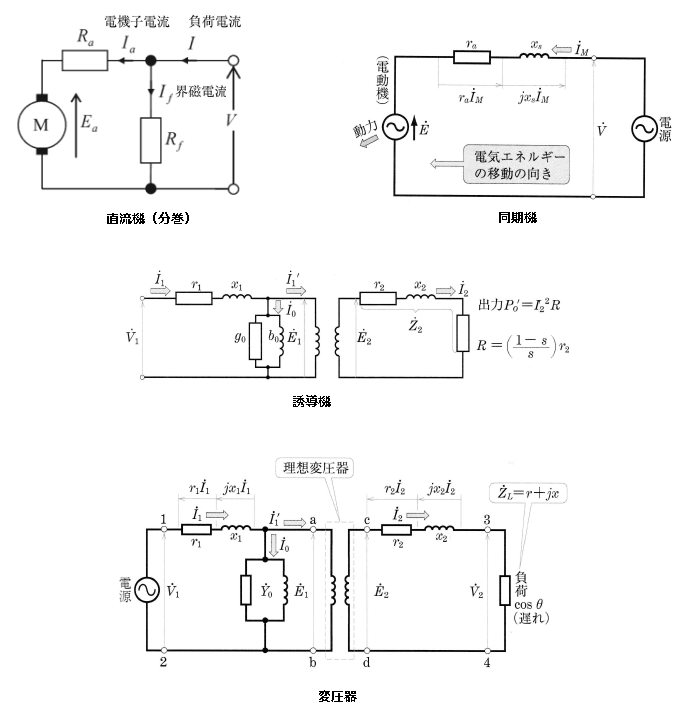
次の文章は、一般的な電気機器(変圧器、直流機、誘導機、同期機)の共通点に関する記述である。
- ( ア )と( イ )は、磁束の大きさ一定、電源電圧(交流機では周波数も)一定のとき回転速度の変化でトルクが変化する。
- 一次巻線に負荷電流と励磁電流を重畳して流す( イ )と( ウ )は、特性計算に用いる等価回路がよく似ている。
- 負荷電流が電機子巻線を流れる( ア )と( エ )は、界磁磁束と電機子反作用磁束のベクトル和の磁束に比例する誘導起電力が発生する。
上記の記述中の空白箇所(ア)、(イ)、(ウ)及び(エ)に当てはまる組合せとして、正しいものを次の(1)~(5)のうちから一つ選べ。
| (ア) | (イ) | (ウ) | (エ) | |
| (1) | 誘導機 | 直流機 | 変圧器 | 同期機 |
| (2) | 同期機 | 直流機 | 変圧器 | 誘導機 |
| (3) | 直流機 | 誘導機 | 変圧器 | 同期機 |
| (4) | 同期機 | 直流機 | 誘導機 | 変圧器 |
| (5) | 直流機 | 誘導機 | 同期機 | 変圧器 |
2017年(平成29年)問6 過去問解説
a ( 直流機 )と( 誘導機 )は、磁束の大きさ一定、電源電圧(交流機では周波数も)一定のとき回転速度の変化でトルクが変化する。
直流機
$E=V-I_aR_a=V$
($E$:逆起電力、$V$:電源電圧、$I_a$:電機子電流、$R_a$:電機子抵抗)
$E=\displaystyle\frac{pZ}{60a}ϕN=K_1ϕN$
($p$:磁極数、$Z$:電機子導体数、$ϕ$:磁極の磁束、$N$:回転数、$a$電機子の並列回路数、$K_1=\displaystyle\frac{pZ}{60a}$:電圧定数)
$T=\displaystyle\frac{pZ}{2πa}×ϕI_a=K_2ϕI_a$
($T$:トルク、$K_2$ :トルク定数)
同期機
$T=\displaystyle\frac{60}{2πn_s}・3P_o=\displaystyle\frac{60}{2πn_s}・\displaystyle\frac{3VE}{x_s}sinδ$
($V$:供給電圧、$E$:電動機の逆起電力、$x_s$:同期リアクタンス、$δ$:負荷角)
誘導機
$T=\displaystyle\frac{60}{2πn_s}・3P_o=\displaystyle\frac{60}{2πn_s}・\displaystyle\frac{3VE}{x_s}sinδ$
($V$:供給電圧、$E$:電動機の逆起電力、$x_s$:同期リアクタンス、$δ$:負荷角)
直流機と誘導機は、回転速度の変化でトルクが変化します。
b 一次巻線に負荷電流と励磁電流を重畳して流す( 誘導機 )と( 変圧器 )は、特性計算に用いる等価回路がよく似ている。
誘導機と変圧器の等価回路は似ています。
c 負荷電流が電機子巻線を流れる( 直流機 )と( 同期機 )は、界磁磁束と電機子反作用磁束のベクトル和の磁束に比例する誘導起電力が発生する。
電機子反作用の影響で、界磁電流と電機子反作用のベクトル和の磁束に比例する誘導起電力が発生す
るのは、直流機と同期機です。
答え (3)